
Magnetic Suspension (ਮੈਗਨੇਟਿਕ) ਦੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਅਤੇ ਫਾਇਦੇ
ਸਮੱਗਰੀ
ਕੋਈ ਵੀ ਆਧੁਨਿਕ, ਇੱਥੋਂ ਤੱਕ ਕਿ ਸਭ ਤੋਂ ਵੱਧ ਬਜਟ ਵਾਲੀ ਕਾਰ ਸਸਪੈਂਸ਼ਨ ਨਾਲ ਲੈਸ ਹੋਵੇਗੀ। ਇਹ ਸਿਸਟਮ ਵੱਖ-ਵੱਖ ਤਰ੍ਹਾਂ ਦੀਆਂ ਸਤਹਾਂ ਵਾਲੀਆਂ ਸੜਕਾਂ 'ਤੇ ਆਰਾਮਦਾਇਕ ਸਵਾਰੀ ਪ੍ਰਦਾਨ ਕਰਨ ਦੇ ਸਮਰੱਥ ਹੈ। ਹਾਲਾਂਕਿ, ਆਰਾਮ ਤੋਂ ਇਲਾਵਾ, ਮਸ਼ੀਨ ਦੇ ਇਸ ਹਿੱਸੇ ਦਾ ਉਦੇਸ਼ ਸੁਰੱਖਿਅਤ ਡਰਾਈਵਿੰਗ ਨੂੰ ਉਤਸ਼ਾਹਿਤ ਕਰਨਾ ਵੀ ਹੈ। ਮੁਅੱਤਲ ਕੀ ਹੈ ਇਸ ਬਾਰੇ ਵੇਰਵਿਆਂ ਲਈ, ਪੜ੍ਹੋ ਇੱਕ ਵੱਖਰੀ ਸਮੀਖਿਆ ਵਿੱਚ.
ਕਿਸੇ ਹੋਰ ਆਟੋ ਸਿਸਟਮ ਦੀ ਤਰ੍ਹਾਂ, ਸਸਪੈਂਸ਼ਨ ਨੂੰ ਅਪਗ੍ਰੇਡ ਕੀਤਾ ਜਾ ਰਿਹਾ ਹੈ। ਵੱਖ-ਵੱਖ ਆਟੋ ਚਿੰਤਾਵਾਂ ਦੇ ਇੰਜੀਨੀਅਰਾਂ ਦੇ ਯਤਨਾਂ ਲਈ ਧੰਨਵਾਦ, ਕਲਾਸੀਕਲ ਮਕੈਨੀਕਲ ਸੋਧਾਂ ਤੋਂ ਇਲਾਵਾ, ਇੱਕ ਨਿਊਮੈਟਿਕ ਡਿਜ਼ਾਈਨ ਪਹਿਲਾਂ ਹੀ ਮੌਜੂਦ ਹੈ (ਇਸ ਬਾਰੇ ਵਿਸਥਾਰ ਵਿੱਚ ਪੜ੍ਹੋ ਇੱਥੇ), ਹਾਈਡ੍ਰੌਲਿਕ ਅਤੇ ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਅਤੇ ਉਹਨਾਂ ਦੀਆਂ ਕਿਸਮਾਂ।
ਆਉ ਵਿਚਾਰ ਕਰੀਏ ਕਿ ਚੁੰਬਕੀ ਕਿਸਮ ਦੇ ਪੈਂਡੈਂਟ ਕਿਵੇਂ ਕੰਮ ਕਰਦੇ ਹਨ, ਉਹਨਾਂ ਦੀਆਂ ਸੋਧਾਂ, ਅਤੇ ਕਲਾਸੀਕਲ ਮਕੈਨੀਕਲ ਬਣਤਰਾਂ ਦੇ ਫਾਇਦੇ ਵੀ।
ਮੈਗਨੈਟਿਕ ਸਸਪੈਂਸ਼ਨ ਕੀ ਹੈ?
ਇਸ ਤੱਥ ਦੇ ਬਾਵਜੂਦ ਕਿ ਕਾਰ ਦੇ ਡੈਂਪਿੰਗ ਸਿਸਟਮ ਵਿੱਚ ਲਗਾਤਾਰ ਸੁਧਾਰ ਕੀਤਾ ਜਾ ਰਿਹਾ ਹੈ, ਅਤੇ ਇਸਦੇ ਡਿਜ਼ਾਈਨ ਵਿੱਚ ਨਵੇਂ ਤੱਤ ਦਿਖਾਈ ਦਿੰਦੇ ਹਨ ਜਾਂ ਵੱਖ-ਵੱਖ ਹਿੱਸਿਆਂ ਦੀ ਜਿਓਮੈਟਰੀ ਬਦਲਦੀ ਹੈ, ਇਸਦਾ ਸੰਚਾਲਨ ਕਾਫ਼ੀ ਹੱਦ ਤੱਕ ਇੱਕੋ ਜਿਹਾ ਰਹਿੰਦਾ ਹੈ। ਸਦਮਾ ਸੋਖਕ ਉਨ੍ਹਾਂ ਝਟਕਿਆਂ ਨੂੰ ਨਰਮ ਕਰਦਾ ਹੈ ਜੋ ਸੜਕ ਤੋਂ ਪਹੀਏ ਰਾਹੀਂ ਸਰੀਰ ਤੱਕ ਸੰਚਾਰਿਤ ਹੁੰਦੇ ਹਨ ਵੱਖਰੇ ਤੌਰ 'ਤੇ). ਬਸੰਤ ਪਹੀਏ ਨੂੰ ਇਸਦੀ ਅਸਲ ਸਥਿਤੀ ਵਿੱਚ ਵਾਪਸ ਕਰ ਦਿੰਦਾ ਹੈ। ਕੰਮ ਦੀ ਇਸ ਯੋਜਨਾ ਲਈ ਧੰਨਵਾਦ, ਕਾਰ ਦੀ ਗਤੀ ਸੜਕ ਦੀ ਸਤ੍ਹਾ 'ਤੇ ਪਹੀਏ ਦੇ ਲਗਾਤਾਰ ਚਿਪਕਣ ਦੇ ਨਾਲ ਹੈ.
ਤੁਸੀਂ ਮਸ਼ੀਨ ਪਲੇਟਫਾਰਮ 'ਤੇ ਇੱਕ ਅਡੈਪਟਿਵ ਡਿਵਾਈਸ ਨੂੰ ਸਥਾਪਿਤ ਕਰਕੇ ਮੁਅੱਤਲ ਮੋਡ ਨੂੰ ਮੂਲ ਰੂਪ ਵਿੱਚ ਬਦਲ ਸਕਦੇ ਹੋ ਜੋ ਸੜਕ ਦੀ ਸਥਿਤੀ ਦੇ ਅਨੁਕੂਲ ਹੋਵੇਗਾ ਅਤੇ ਵਾਹਨ ਦੇ ਪ੍ਰਬੰਧਨ ਵਿੱਚ ਸੁਧਾਰ ਕਰੇਗਾ, ਭਾਵੇਂ ਸੜਕ ਕਿੰਨੀ ਵੀ ਚੰਗੀ ਜਾਂ ਮਾੜੀ ਕਿਉਂ ਨਾ ਹੋਵੇ। ਅਜਿਹੇ ਢਾਂਚੇ ਦੀ ਇੱਕ ਉਦਾਹਰਨ ਇੱਕ ਅਨੁਕੂਲ ਮੁਅੱਤਲ ਹੈ, ਜੋ ਕਿ ਵੱਖ-ਵੱਖ ਸੰਸਕਰਣਾਂ ਵਿੱਚ ਪਹਿਲਾਂ ਹੀ ਸੀਰੀਅਲ ਮਾਡਲਾਂ 'ਤੇ ਸਥਾਪਿਤ ਹੈ (ਇਸ ਕਿਸਮ ਦੇ ਡਿਵਾਈਸ ਬਾਰੇ ਵੇਰਵਿਆਂ ਲਈ, ਪੜ੍ਹੋ ਇੱਥੇ).
ਅਨੁਕੂਲਨ ਵਿਧੀ ਦੇ ਰੂਪਾਂ ਵਿੱਚੋਂ ਇੱਕ ਦੇ ਰੂਪ ਵਿੱਚ, ਇੱਕ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਕਿਸਮ ਦਾ ਮੁਅੱਤਲ ਵਿਕਸਿਤ ਕੀਤਾ ਗਿਆ ਸੀ। ਜੇ ਅਸੀਂ ਇਸ ਵਿਕਾਸ ਦੀ ਤੁਲਨਾ ਹਾਈਡ੍ਰੌਲਿਕ ਐਨਾਲਾਗ ਨਾਲ ਕਰਦੇ ਹਾਂ, ਤਾਂ ਦੂਜੀ ਸੋਧ ਵਿੱਚ ਐਕਚੁਏਟਰਾਂ ਵਿੱਚ ਇੱਕ ਵਿਸ਼ੇਸ਼ ਤਰਲ ਹੁੰਦਾ ਹੈ। ਇਲੈਕਟ੍ਰੋਨਿਕਸ ਜਲ ਭੰਡਾਰਾਂ ਵਿੱਚ ਦਬਾਅ ਨੂੰ ਬਦਲਦਾ ਹੈ, ਤਾਂ ਜੋ ਹਰੇਕ ਨਮੀ ਵਾਲਾ ਤੱਤ ਆਪਣੀ ਕਠੋਰਤਾ ਨੂੰ ਬਦਲਦਾ ਹੈ। ਸਿਧਾਂਤ ਨਯੂਮੈਟਿਕ ਕਿਸਮ ਲਈ ਸਮਾਨ ਹੈ. ਅਜਿਹੇ ਸਿਸਟਮਾਂ ਦਾ ਨੁਕਸਾਨ ਇਹ ਹੈ ਕਿ ਕੰਮ ਕਰਨ ਵਾਲਾ ਸਰਕਟ ਸੜਕ ਦੀ ਸਥਿਤੀ ਦੇ ਅਨੁਕੂਲ ਹੋਣ ਦੇ ਯੋਗ ਨਹੀਂ ਹੁੰਦਾ ਹੈ, ਕਿਉਂਕਿ ਇਸ ਨੂੰ ਕਾਰਜਸ਼ੀਲ ਮਾਧਿਅਮ ਦੀ ਵਾਧੂ ਮਾਤਰਾ ਨਾਲ ਭਰਨ ਦੀ ਜ਼ਰੂਰਤ ਹੁੰਦੀ ਹੈ, ਜਿਸ ਵਿੱਚ ਸਭ ਤੋਂ ਵੱਧ ਕੁਝ ਸਕਿੰਟ ਲੱਗਦੇ ਹਨ.
ਇਸ ਕੰਮ ਨਾਲ ਸਿੱਝਣ ਦਾ ਸਭ ਤੋਂ ਤੇਜ਼ ਤਰੀਕਾ ਕਾਰਜਕਾਰੀ ਤੱਤਾਂ ਦੇ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਪਰਸਪਰ ਪ੍ਰਭਾਵ ਦੇ ਆਧਾਰ 'ਤੇ ਕੰਮ ਕਰਨ ਵਾਲੀਆਂ ਵਿਧੀਆਂ ਹੋ ਸਕਦੀਆਂ ਹਨ। ਉਹ ਕਮਾਂਡ ਲਈ ਵਧੇਰੇ ਜਵਾਬਦੇਹ ਹਨ, ਕਿਉਂਕਿ ਡੈਂਪਿੰਗ ਮੋਡ ਨੂੰ ਬਦਲਣ ਲਈ, ਟੈਂਕ ਤੋਂ ਕੰਮ ਕਰਨ ਵਾਲੇ ਮਾਧਿਅਮ ਨੂੰ ਪੰਪ ਕਰਨਾ ਜਾਂ ਨਿਕਾਸ ਕਰਨਾ ਜ਼ਰੂਰੀ ਨਹੀਂ ਹੈ. ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਵਿੱਚ ਇਲੈਕਟ੍ਰੋਨਿਕਸ ਕਮਾਂਡ ਦਿੰਦੇ ਹਨ, ਅਤੇ ਡਿਵਾਈਸ ਤੁਰੰਤ ਇਹਨਾਂ ਸਿਗਨਲਾਂ ਦਾ ਜਵਾਬ ਦਿੰਦੀ ਹੈ।
ਵਧੀ ਹੋਈ ਰਾਈਡ ਆਰਾਮ, ਉੱਚ ਸਪੀਡ 'ਤੇ ਸੁਰੱਖਿਆ ਅਤੇ ਅਸਥਿਰ ਸੜਕੀ ਸਤਹਾਂ, ਅਤੇ ਨਾਲ ਹੀ ਹੈਂਡਲਿੰਗ ਦੀ ਸੌਖ ਮੁੱਖ ਕਾਰਨ ਹਨ ਕਿ ਡਿਵੈਲਪਰ ਉਤਪਾਦਨ ਵਾਹਨਾਂ ਵਿੱਚ ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਲਾਗੂ ਕਰਨ ਦੀ ਕੋਸ਼ਿਸ਼ ਕਰ ਰਹੇ ਹਨ, ਕਿਉਂਕਿ ਕਲਾਸਿਕ ਡਿਜ਼ਾਈਨ ਇਸ ਸਬੰਧ ਵਿੱਚ ਆਦਰਸ਼ ਮਾਪਦੰਡਾਂ ਨੂੰ ਪ੍ਰਾਪਤ ਕਰਨ ਦੇ ਯੋਗ ਨਹੀਂ ਹਨ।
ਇੱਕ "ਹੋਵਰਿੰਗ" ਵਾਹਨ ਬਣਾਉਣ ਦਾ ਵਿਚਾਰ ਨਵਾਂ ਨਹੀਂ ਹੈ. ਉਹ ਅਕਸਰ ਗਰਵੀਕਰਾਂ ਦੀਆਂ ਸ਼ਾਨਦਾਰ ਉਡਾਣਾਂ ਦੇ ਨਾਲ ਸ਼ਾਨਦਾਰ ਕੰਮਾਂ ਦੇ ਪੰਨਿਆਂ 'ਤੇ ਪਾਈ ਜਾਂਦੀ ਹੈ। ਪਿਛਲੀ ਸਦੀ ਦੇ 80 ਦੇ ਦਹਾਕੇ ਦੇ ਪਹਿਲੇ ਸਾਲਾਂ ਤੱਕ, ਇਹ ਵਿਚਾਰ ਗਲਪ ਦੇ ਪੜਾਅ 'ਤੇ ਰਿਹਾ, ਅਤੇ ਸਿਰਫ ਕੁਝ ਖੋਜਕਰਤਾਵਾਂ ਨੇ ਇਸਨੂੰ ਸੰਭਵ ਮੰਨਿਆ, ਪਰ ਦੂਰ ਦੇ ਭਵਿੱਖ ਵਿੱਚ.
ਹਾਲਾਂਕਿ, 1982 ਵਿੱਚ, ਇੱਕ ਚੁੰਬਕੀ ਮੁਅੱਤਲ 'ਤੇ ਚੱਲਣ ਵਾਲੀ ਰੇਲਗੱਡੀ ਦਾ ਦੁਨੀਆ ਦਾ ਪਹਿਲਾ ਵਿਕਾਸ ਪ੍ਰਗਟ ਹੋਇਆ। ਇਸ ਵਾਹਨ ਨੂੰ ਮੈਗਨੇਟੋਪਲੇਨ ਕਿਹਾ ਜਾਂਦਾ ਸੀ। ਕਲਾਸੀਕਲ ਐਨਾਲਾਗਾਂ ਦੀ ਤੁਲਨਾ ਵਿੱਚ, ਇਸ ਰੇਲਗੱਡੀ ਨੇ ਉਸ ਸਮੇਂ ਇੱਕ ਬੇਮਿਸਾਲ ਗਤੀ ਵਿਕਸਤ ਕੀਤੀ - 500 ਕਿਲੋਮੀਟਰ / ਘੰਟਾ ਤੋਂ ਵੱਧ, ਅਤੇ "ਉਡਾਣ" ਦੀ ਇਸਦੀ ਨਰਮਤਾ ਅਤੇ ਕੰਮ ਦੀ ਸ਼ੋਰ-ਰਹਿਤ ਦੇ ਸਬੰਧ ਵਿੱਚ, ਸਿਰਫ ਪੰਛੀ ਹੀ ਅਸਲ ਮੁਕਾਬਲਾ ਕਰ ਸਕਦੇ ਸਨ। ਇਸ ਵਿਕਾਸ ਨੂੰ ਲਾਗੂ ਕਰਨ ਦੀ ਰਫਤਾਰ ਹੌਲੀ ਹੋਣ ਕਾਰਨ ਸਿਰਫ ਇਕ ਕਮਜ਼ੋਰੀ ਹੈ, ਨਾ ਸਿਰਫ ਰੇਲਗੱਡੀ ਦੀ ਉੱਚ ਕੀਮਤ। ਉਸਨੂੰ ਹਿੱਲਣ ਦੇ ਯੋਗ ਹੋਣ ਲਈ, ਉਸਨੂੰ ਇੱਕ ਵਿਸ਼ੇਸ਼ ਟਰੈਕ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ ਜੋ ਸਹੀ ਚੁੰਬਕੀ ਖੇਤਰ ਪ੍ਰਦਾਨ ਕਰਦਾ ਹੈ।

ਹਾਲਾਂਕਿ ਇਹ ਵਿਕਾਸ ਅਜੇ ਤੱਕ ਆਟੋਮੋਟਿਵ ਉਦਯੋਗ ਵਿੱਚ ਲਾਗੂ ਨਹੀਂ ਕੀਤਾ ਗਿਆ ਹੈ, ਵਿਗਿਆਨੀ ਇਸ ਪ੍ਰੋਜੈਕਟ ਨੂੰ "ਸ਼ੈਲਫ ਉੱਤੇ ਧੂੜ ਇਕੱਠਾ ਕਰਨਾ" ਨਹੀਂ ਛੱਡਦੇ ਹਨ। ਕਾਰਨ ਇਹ ਹੈ ਕਿ ਓਪਰੇਸ਼ਨ ਦਾ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਸਿਧਾਂਤ ਸੜਕ ਦੀ ਸਤ੍ਹਾ 'ਤੇ ਡ੍ਰਾਈਵਿੰਗ ਪਹੀਏ ਦੇ ਰਗੜ ਨੂੰ ਪੂਰੀ ਤਰ੍ਹਾਂ ਖਤਮ ਕਰਦਾ ਹੈ, ਸਿਰਫ ਹਵਾ ਪ੍ਰਤੀਰੋਧ ਨੂੰ ਛੱਡ ਕੇ. ਕਿਉਂਕਿ ਸਾਰੇ ਪਹੀਆ ਵਾਹਨਾਂ ਨੂੰ ਇੱਕ ਸਮਾਨ ਕਿਸਮ ਦੀ ਚੈਸੀ ਵਿੱਚ ਤਬਦੀਲ ਕਰਨਾ ਅਸੰਭਵ ਹੈ (ਸੰਸਾਰ ਭਰ ਵਿੱਚ ਸੰਬੰਧਿਤ ਸੜਕਾਂ ਬਣਾਉਣ ਲਈ ਇਹ ਜ਼ਰੂਰੀ ਹੋਵੇਗਾ), ਇੰਜਨੀਅਰਾਂ ਨੇ ਇਸ ਵਿਕਾਸ ਨੂੰ ਕਾਰਾਂ ਦੇ ਮੁਅੱਤਲ ਵਿੱਚ ਪੇਸ਼ ਕਰਨ 'ਤੇ ਧਿਆਨ ਦਿੱਤਾ.
ਟੈਸਟ ਦੇ ਨਮੂਨਿਆਂ 'ਤੇ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਤੱਤਾਂ ਦੀ ਸਥਾਪਨਾ ਲਈ ਧੰਨਵਾਦ, ਵਿਗਿਆਨੀ ਸੰਕਲਪ ਵਾਲੀਆਂ ਕਾਰਾਂ ਨੂੰ ਬਿਹਤਰ ਗਤੀਸ਼ੀਲਤਾ ਅਤੇ ਨਿਯੰਤਰਣਯੋਗਤਾ ਪ੍ਰਦਾਨ ਕਰਨ ਦੇ ਯੋਗ ਸਨ। ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਦਾ ਡਿਜ਼ਾਈਨ ਕਾਫ਼ੀ ਗੁੰਝਲਦਾਰ ਹੈ। ਇਹ ਇੱਕ ਰੈਕ ਹੈ ਜੋ ਮੈਕਫਰਸਨ ਰੈਕ ਦੇ ਸਮਾਨ ਸਿਧਾਂਤ ਦੇ ਅਨੁਸਾਰ ਸਾਰੇ ਪਹੀਆਂ 'ਤੇ ਸਥਾਪਿਤ ਕੀਤਾ ਗਿਆ ਹੈ (ਇਸ ਬਾਰੇ ਵਿਸਥਾਰ ਵਿੱਚ ਪੜ੍ਹੋ ਇਕ ਹੋਰ ਲੇਖ ਵਿਚ). ਇਹਨਾਂ ਤੱਤਾਂ ਨੂੰ ਇੱਕ ਡੈਂਪਰ ਮਕੈਨਿਜ਼ਮ (ਸਦਮਾ ਸ਼ੋਸ਼ਕ) ਜਾਂ ਬਸੰਤ ਦੀ ਲੋੜ ਨਹੀਂ ਹੁੰਦੀ ਹੈ।
ਇਸ ਸਿਸਟਮ ਦੇ ਸੰਚਾਲਨ ਦੀ ਸੁਧਾਈ ਇਲੈਕਟ੍ਰਾਨਿਕ ਕੰਟਰੋਲ ਯੂਨਿਟ ਦੁਆਰਾ ਕੀਤੀ ਜਾਂਦੀ ਹੈ (ਵੱਖਰਾ, ਕਿਉਂਕਿ ਮਾਈਕ੍ਰੋਪ੍ਰੋਸੈਸਰ ਨੂੰ ਬਹੁਤ ਸਾਰੇ ਡੇਟਾ ਦੀ ਪ੍ਰਕਿਰਿਆ ਕਰਨ ਅਤੇ ਵੱਡੀ ਗਿਣਤੀ ਵਿੱਚ ਐਲਗੋਰਿਦਮ ਨੂੰ ਸਰਗਰਮ ਕਰਨ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ)। ਇਸ ਸਸਪੈਂਸ਼ਨ ਦੀ ਇਕ ਹੋਰ ਵਿਸ਼ੇਸ਼ਤਾ ਇਹ ਹੈ ਕਿ, ਕਲਾਸਿਕ ਸੰਸਕਰਣਾਂ ਦੇ ਉਲਟ, ਇਸ ਨੂੰ ਮੋੜਾਂ ਅਤੇ ਤੇਜ਼ ਰਫਤਾਰ 'ਤੇ ਵਾਹਨ ਦੀ ਸਥਿਰਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਟੋਰਸ਼ਨ ਬਾਰ, ਸਟੈਬੀਲਾਈਜ਼ਰ ਜਾਂ ਹੋਰ ਹਿੱਸਿਆਂ ਦੀ ਜ਼ਰੂਰਤ ਨਹੀਂ ਹੈ। ਇਸਦੀ ਬਜਾਏ, ਇੱਕ ਵਿਸ਼ੇਸ਼ ਚੁੰਬਕੀ ਤਰਲ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ, ਜੋ ਇੱਕ ਤਰਲ ਅਤੇ ਇੱਕ ਚੁੰਬਕੀ ਸਮੱਗਰੀ, ਜਾਂ ਸੋਲਨੋਇਡ ਵਾਲਵ ਦੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਨੂੰ ਜੋੜਦਾ ਹੈ।
ਕੁਝ ਆਧੁਨਿਕ ਕਾਰਾਂ ਤੇਲ ਦੀ ਬਜਾਏ ਸਮਾਨ ਪਦਾਰਥ ਨਾਲ ਸਦਮਾ ਸੋਖਕ ਵਰਤਦੀਆਂ ਹਨ। ਕਿਉਂਕਿ ਸਿਸਟਮ ਦੀ ਅਸਫਲਤਾ ਦੀ ਇੱਕ ਉੱਚ ਸੰਭਾਵਨਾ ਹੈ (ਆਖ਼ਰਕਾਰ, ਇਹ ਅਜੇ ਵੀ ਇੱਕ ਨਵਾਂ ਵਿਕਾਸ ਹੈ, ਜਿਸ ਬਾਰੇ ਅਜੇ ਤੱਕ ਪੂਰੀ ਤਰ੍ਹਾਂ ਸੋਚਿਆ ਨਹੀਂ ਗਿਆ ਹੈ), ਇਸਦੀ ਡਿਵਾਈਸ ਵਿੱਚ ਸਪ੍ਰਿੰਗਸ ਮੌਜੂਦ ਹੋ ਸਕਦੇ ਹਨ.
ਇਸ ਦਾ ਕੰਮ ਕਰਦਾ ਹੈ
ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਸ ਦੇ ਪਰਸਪਰ ਪ੍ਰਭਾਵ ਦੇ ਸਿਧਾਂਤ ਨੂੰ ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਦੇ ਕੰਮ ਦੇ ਆਧਾਰ ਵਜੋਂ ਲਿਆ ਜਾਂਦਾ ਹੈ (ਹਾਈਡ੍ਰੌਲਿਕਸ ਵਿੱਚ ਇਹ ਤਰਲ ਹੈ, ਵਾਯੂਮੈਟਿਕ ਹਵਾ ਵਿੱਚ - ਹਵਾ, ਅਤੇ ਮਕੈਨਿਕਸ ਵਿੱਚ - ਲਚਕੀਲੇ ਹਿੱਸੇ ਜਾਂ ਸਪ੍ਰਿੰਗਜ਼)। ਇਸ ਸਿਸਟਮ ਦੇ ਸੰਚਾਲਨ ਵਿੱਚ ਹੇਠ ਲਿਖੇ ਸਿਧਾਂਤ ਹਨ।
ਸਕੂਲ ਦੇ ਕੋਰਸ ਤੋਂ, ਹਰ ਕੋਈ ਜਾਣਦਾ ਹੈ ਕਿ ਚੁੰਬਕ ਦੇ ਇੱਕੋ ਜਿਹੇ ਖੰਭੇ ਆਪਸ ਵਿੱਚ ਦੂਰ ਹੁੰਦੇ ਹਨ. ਚੁੰਬਕੀ ਤੱਤਾਂ ਨੂੰ ਜੋੜਨ ਲਈ, ਤੁਹਾਨੂੰ ਕਾਫ਼ੀ ਮਿਹਨਤ ਕਰਨ ਦੀ ਲੋੜ ਹੋਵੇਗੀ (ਇਹ ਪੈਰਾਮੀਟਰ ਕਨੈਕਟ ਕੀਤੇ ਜਾਣ ਵਾਲੇ ਤੱਤਾਂ ਦੇ ਆਕਾਰ ਅਤੇ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਤਾਕਤ 'ਤੇ ਨਿਰਭਰ ਕਰਦਾ ਹੈ)। ਕਾਰ ਦੇ ਭਾਰ ਦਾ ਸਾਮ੍ਹਣਾ ਕਰਨ ਲਈ ਅਜਿਹੇ ਮਜ਼ਬੂਤ ਖੇਤਰ ਵਾਲੇ ਸਥਾਈ ਚੁੰਬਕ ਲੱਭਣੇ ਮੁਸ਼ਕਲ ਹਨ, ਅਤੇ ਅਜਿਹੇ ਤੱਤਾਂ ਦੇ ਮਾਪ ਉਹਨਾਂ ਨੂੰ ਕਾਰਾਂ ਵਿੱਚ ਵਰਤਣ ਦੀ ਇਜਾਜ਼ਤ ਨਹੀਂ ਦੇਣਗੇ, ਸੜਕ ਦੀ ਸਥਿਤੀ ਦੇ ਅਨੁਕੂਲ ਹੋਣ ਦਿਓ।

ਤੁਸੀਂ ਬਿਜਲੀ ਨਾਲ ਚੁੰਬਕ ਵੀ ਬਣਾ ਸਕਦੇ ਹੋ। ਇਸ ਸਥਿਤੀ ਵਿੱਚ, ਇਹ ਕੇਵਲ ਉਦੋਂ ਹੀ ਕੰਮ ਕਰੇਗਾ ਜਦੋਂ ਐਕਟੁਏਟਰ 'ਤੇ ਇੱਕ ਕਰੰਟ ਲਾਗੂ ਹੁੰਦਾ ਹੈ। ਇਸ ਕੇਸ ਵਿੱਚ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਤਾਕਤ ਨੂੰ ਪਰਸਪਰ ਪ੍ਰਭਾਵ ਵਾਲੇ ਹਿੱਸਿਆਂ 'ਤੇ ਕਰੰਟ ਵਧਾ ਕੇ ਨਿਯੰਤ੍ਰਿਤ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ। ਇਸ ਪ੍ਰਕਿਰਿਆ ਦੁਆਰਾ, ਤੁਸੀਂ ਘਿਣਾਉਣੀ ਸ਼ਕਤੀ ਨੂੰ ਵਧਾ ਜਾਂ ਘਟਾ ਸਕਦੇ ਹੋ, ਅਤੇ ਇਸਦੇ ਨਾਲ ਮੁਅੱਤਲ ਦੀ ਕਠੋਰਤਾ.
ਇਲੈਕਟ੍ਰੋਮੈਗਨੇਟ ਦੀਆਂ ਅਜਿਹੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਉਹਨਾਂ ਨੂੰ ਸਪਰਿੰਗਜ਼ ਅਤੇ ਡੈਂਪਰਾਂ ਵਜੋਂ ਵਰਤਣਾ ਸੰਭਵ ਬਣਾਉਂਦੀਆਂ ਹਨ। ਇਸਦੇ ਲਈ, ਢਾਂਚੇ ਵਿੱਚ ਘੱਟੋ-ਘੱਟ ਦੋ ਇਲੈਕਟ੍ਰੋਮੈਗਨੇਟ ਹੋਣੇ ਚਾਹੀਦੇ ਹਨ। ਭਾਗਾਂ ਨੂੰ ਸੰਕੁਚਿਤ ਕਰਨ ਵਿੱਚ ਅਸਮਰੱਥਾ ਦਾ ਇੱਕ ਕਲਾਸਿਕ ਸਦਮਾ ਸੋਖਕ ਵਰਗਾ ਹੀ ਪ੍ਰਭਾਵ ਹੁੰਦਾ ਹੈ, ਅਤੇ ਚੁੰਬਕ ਦੀ ਘਿਣਾਉਣੀ ਸ਼ਕਤੀ ਇੱਕ ਬਸੰਤ ਜਾਂ ਬਸੰਤ ਦੀ ਤੁਲਨਾ ਵਿੱਚ ਹੁੰਦੀ ਹੈ। ਇਹਨਾਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਦੇ ਸੁਮੇਲ ਦੇ ਕਾਰਨ, ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਸਪਰਿੰਗ ਮਕੈਨੀਕਲ ਸਮਰੂਪਾਂ ਦੇ ਮੁਕਾਬਲੇ ਬਹੁਤ ਤੇਜ਼ੀ ਨਾਲ ਪ੍ਰਤੀਕਿਰਿਆ ਕਰਦੀ ਹੈ, ਅਤੇ ਸਿਗਨਲਾਂ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰਨ ਲਈ ਪ੍ਰਤੀਕਿਰਿਆ ਸਮਾਂ ਬਹੁਤ ਘੱਟ ਹੁੰਦਾ ਹੈ, ਜਿਵੇਂ ਕਿ ਹਾਈਡ੍ਰੌਲਿਕਸ ਜਾਂ ਨਿਊਮੈਟਿਕਸ ਦੇ ਮਾਮਲੇ ਵਿੱਚ।
ਡਿਵੈਲਪਰਾਂ ਦੇ ਸ਼ਸਤਰ ਵਿੱਚ ਪਹਿਲਾਂ ਹੀ ਵੱਖ-ਵੱਖ ਸੋਧਾਂ ਦੇ ਕੰਮ ਕਰਨ ਵਾਲੇ ਇਲੈਕਟ੍ਰੋਮੈਗਨੇਟ ਦੀ ਕਾਫੀ ਗਿਣਤੀ ਹੈ. ਜੋ ਬਚਿਆ ਹੈ ਉਹ ਇੱਕ ਕੁਸ਼ਲ ਮੁਅੱਤਲ ECU ਬਣਾਉਣਾ ਹੈ ਜੋ ਚੈਸੀ ਅਤੇ ਸਥਿਤੀ ਸੈਂਸਰਾਂ ਤੋਂ ਸਿਗਨਲ ਪ੍ਰਾਪਤ ਕਰੇਗਾ ਅਤੇ ਮੁਅੱਤਲ ਨੂੰ ਵਧੀਆ-ਟਿਊਨ ਕਰੇਗਾ। ਸਿਧਾਂਤ ਵਿੱਚ, ਇਹ ਵਿਚਾਰ ਲਾਗੂ ਕਰਨ ਲਈ ਕਾਫ਼ੀ ਯਥਾਰਥਵਾਦੀ ਹੈ, ਪਰ ਅਭਿਆਸ ਦਰਸਾਉਂਦਾ ਹੈ ਕਿ ਇਸ ਵਿਕਾਸ ਵਿੱਚ ਕਈ "ਨੁਕਸਾਨ" ਹਨ।
ਸਭ ਤੋਂ ਪਹਿਲਾਂ, ਔਸਤ ਸਮੱਗਰੀ ਆਮਦਨ ਵਾਲੇ ਇੱਕ ਵਾਹਨ ਚਾਲਕ ਲਈ ਅਜਿਹੀ ਸਥਾਪਨਾ ਦੀ ਲਾਗਤ ਬਹੁਤ ਜ਼ਿਆਦਾ ਹੋਵੇਗੀ. ਅਤੇ ਹਰ ਅਮੀਰ ਵਿਅਕਤੀ ਪੂਰੀ ਤਰ੍ਹਾਂ ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਵਾਲੀ ਕਾਰ ਖਰੀਦਣ ਦੀ ਸਮਰੱਥਾ ਨਹੀਂ ਰੱਖਦਾ. ਦੂਜਾ, ਅਜਿਹੀ ਪ੍ਰਣਾਲੀ ਦਾ ਰੱਖ-ਰਖਾਅ ਵਾਧੂ ਮੁਸ਼ਕਲਾਂ ਨਾਲ ਜੁੜਿਆ ਹੋਵੇਗਾ, ਉਦਾਹਰਨ ਲਈ, ਮੁਰੰਮਤ ਦੀ ਗੁੰਝਲਤਾ ਅਤੇ ਬਹੁਤ ਘੱਟ ਮਾਹਰ ਜੋ ਸਿਸਟਮ ਦੀਆਂ ਪੇਚੀਦਗੀਆਂ ਨੂੰ ਸਮਝਦੇ ਹਨ.
ਇੱਕ ਪੂਰੀ ਤਰ੍ਹਾਂ ਨਾਲ ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਵਿਕਸਿਤ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ, ਪਰ ਇਹ ਯੋਗ ਮੁਕਾਬਲਾ ਪੈਦਾ ਕਰਨ ਦੇ ਯੋਗ ਨਹੀਂ ਹੋਵੇਗਾ, ਕਿਉਂਕਿ ਬਹੁਤ ਘੱਟ ਲੋਕ ਅਨੁਕੂਲ ਮੁਅੱਤਲ ਦੇ ਜਵਾਬ ਦੀ ਗਤੀ ਲਈ ਇੱਕ ਕਿਸਮਤ ਨੂੰ ਬਾਹਰ ਕੱਢਣਾ ਚਾਹੁਣਗੇ। ਬਹੁਤ ਸਸਤਾ, ਅਤੇ ਚੰਗੀ ਸਫਲਤਾ ਦੇ ਨਾਲ, ਕਲਾਸਿਕ ਸਦਮਾ ਸੋਖਕ ਦੇ ਡਿਜ਼ਾਈਨ ਵਿੱਚ ਇਲੈਕਟ੍ਰਿਕਲੀ ਨਿਯੰਤਰਿਤ ਚੁੰਬਕੀ ਤੱਤਾਂ ਨੂੰ ਪੇਸ਼ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ।
ਅਤੇ ਇਸ ਤਕਨਾਲੋਜੀ ਵਿੱਚ ਪਹਿਲਾਂ ਹੀ ਦੋ ਐਪਲੀਕੇਸ਼ਨ ਹਨ:
- ਸਦਮਾ ਸ਼ੋਸ਼ਕ ਵਿੱਚ ਇੱਕ ਇਲੈਕਟ੍ਰੋਮੈਕਨੀਕਲ ਵਾਲਵ ਸਥਾਪਿਤ ਕਰੋ ਜੋ ਚੈਨਲ ਦੇ ਭਾਗ ਨੂੰ ਬਦਲਦਾ ਹੈ ਜਿਸ ਰਾਹੀਂ ਤੇਲ ਇੱਕ ਗੁਫਾ ਤੋਂ ਦੂਜੇ ਵਿੱਚ ਜਾਂਦਾ ਹੈ। ਇਸ ਸਥਿਤੀ ਵਿੱਚ, ਤੁਸੀਂ ਮੁਅੱਤਲ ਦੀ ਕਠੋਰਤਾ ਨੂੰ ਤੇਜ਼ੀ ਨਾਲ ਬਦਲ ਸਕਦੇ ਹੋ: ਬਾਈਪਾਸ ਖੁੱਲਣ ਦਾ ਚੌੜਾ, ਸਦਮਾ ਸੋਖਕ ਕੰਮ ਕਰਦਾ ਹੈ ਅਤੇ ਇਸਦੇ ਉਲਟ.
- ਇੱਕ ਚੁੰਬਕੀ ਰੀਓਲੋਜੀਕਲ ਤਰਲ ਨੂੰ ਸਦਮਾ ਸੋਖਕ ਕੈਵਿਟੀ ਵਿੱਚ ਇੰਜੈਕਟ ਕਰੋ, ਜੋ ਇਸ ਉੱਤੇ ਇੱਕ ਚੁੰਬਕੀ ਖੇਤਰ ਦੇ ਪ੍ਰਭਾਵ ਕਾਰਨ ਇਸਦੇ ਗੁਣਾਂ ਨੂੰ ਬਦਲਦਾ ਹੈ। ਇਸ ਸੋਧ ਦਾ ਸਾਰ ਪਿਛਲੇ ਇੱਕ ਸਮਾਨ ਹੈ - ਕੰਮ ਕਰਨ ਵਾਲਾ ਪਦਾਰਥ ਇੱਕ ਚੈਂਬਰ ਤੋਂ ਦੂਜੇ ਚੈਂਬਰ ਵਿੱਚ ਤੇਜ਼ ਜਾਂ ਹੌਲੀ ਵਹਿੰਦਾ ਹੈ।
ਦੋਵੇਂ ਵਿਕਲਪ ਪਹਿਲਾਂ ਹੀ ਕੁਝ ਉਤਪਾਦਨ ਵਾਹਨਾਂ ਵਿੱਚ ਵਰਤੇ ਜਾਂਦੇ ਹਨ। ਪਹਿਲਾ ਵਿਕਾਸ ਇੰਨਾ ਤੇਜ਼ ਨਹੀਂ ਹੈ, ਪਰ ਇਹ ਚੁੰਬਕੀ ਤਰਲ ਨਾਲ ਭਰੇ ਸਦਮਾ ਸੋਖਕ ਦੇ ਮੁਕਾਬਲੇ ਸਸਤਾ ਹੈ।
ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਦੀਆਂ ਕਿਸਮਾਂ
ਕਿਉਂਕਿ ਇੱਕ ਪੂਰਨ ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਅਜੇ ਵੀ ਵਿਕਾਸ ਅਧੀਨ ਹੈ, ਆਟੋਮੇਕਰ ਉੱਪਰ ਦੱਸੇ ਗਏ ਦੋ ਮਾਰਗਾਂ ਵਿੱਚੋਂ ਇੱਕ ਦੀ ਪਾਲਣਾ ਕਰਦੇ ਹੋਏ, ਆਪਣੇ ਕਾਰ ਮਾਡਲਾਂ ਵਿੱਚ ਇਸ ਸਕੀਮ ਨੂੰ ਅੰਸ਼ਕ ਤੌਰ 'ਤੇ ਲਾਗੂ ਕਰ ਰਹੇ ਹਨ।
ਸੰਸਾਰ ਵਿੱਚ, ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਦੇ ਸਾਰੇ ਵਿਕਾਸ ਵਿੱਚ, ਤਿੰਨ ਕਿਸਮਾਂ ਹਨ ਜੋ ਧਿਆਨ ਦੇ ਹੱਕਦਾਰ ਹਨ। ਵੱਖ-ਵੱਖ ਐਕਟੀਵੇਟਰਾਂ ਦੇ ਸੰਚਾਲਨ, ਡਿਜ਼ਾਈਨ ਅਤੇ ਵਰਤੋਂ ਦੇ ਸਿਧਾਂਤ ਵਿੱਚ ਅੰਤਰ ਦੇ ਬਾਵਜੂਦ, ਇਹਨਾਂ ਸਾਰੀਆਂ ਸੋਧਾਂ ਵਿੱਚ ਕਈ ਸਮਾਨਤਾਵਾਂ ਹਨ। ਸੂਚੀ ਵਿੱਚ ਸ਼ਾਮਲ ਹਨ:
- ਲੀਵਰ ਅਤੇ ਕਾਰ ਚੱਲਣ ਦੇ ਹੋਰ ਤੱਤ, ਜੋ ਮੁਅੱਤਲ ਦੇ ਕੰਮ ਦੌਰਾਨ ਪਹੀਏ ਦੀ ਗਤੀ ਦੀ ਦਿਸ਼ਾ ਨਿਰਧਾਰਤ ਕਰਦੇ ਹਨ;
- ਸਰੀਰ ਦੇ ਮੁਕਾਬਲੇ ਪਹੀਏ ਦੀ ਸਥਿਤੀ, ਉਹਨਾਂ ਦੇ ਘੁੰਮਣ ਦੀ ਗਤੀ ਅਤੇ ਕਾਰ ਦੇ ਸਾਹਮਣੇ ਸੜਕ ਦੀ ਸਥਿਤੀ ਲਈ ਸੈਂਸਰ। ਇਸ ਸੂਚੀ ਵਿੱਚ ਆਮ-ਉਦੇਸ਼ ਵਾਲੇ ਸੈਂਸਰ ਵੀ ਸ਼ਾਮਲ ਹਨ - ਗੈਸ / ਬ੍ਰੇਕ ਪੈਡਲ ਨੂੰ ਦਬਾਉਣ ਦੀ ਤਾਕਤ, ਇੰਜਣ ਲੋਡ, ਇੰਜਣ ਦੀ ਗਤੀ, ਆਦਿ;
- ਇੱਕ ਵੱਖਰੀ ਨਿਯੰਤਰਣ ਯੂਨਿਟ ਜਿਸ ਵਿੱਚ ਸਿਸਟਮ ਵਿੱਚ ਸਾਰੇ ਸੈਂਸਰਾਂ ਤੋਂ ਸਿਗਨਲ ਇਕੱਠੇ ਕੀਤੇ ਅਤੇ ਸੰਸਾਧਿਤ ਕੀਤੇ ਜਾਂਦੇ ਹਨ। ਮਾਈਕ੍ਰੋਪ੍ਰੋਸੈਸਰ ਐਲਗੋਰਿਦਮ ਦੇ ਅਨੁਸਾਰ ਨਿਯੰਤਰਣ ਦਾਲਾਂ ਤਿਆਰ ਕਰਦਾ ਹੈ ਜੋ ਉਤਪਾਦਨ ਦੇ ਦੌਰਾਨ ਸਟਿੱਚ ਕੀਤੇ ਗਏ ਹਨ;
- ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਸ, ਜਿਸ ਵਿੱਚ, ਬਿਜਲੀ ਦੇ ਪ੍ਰਭਾਵ ਅਧੀਨ, ਅਨੁਸਾਰੀ ਧਰੁਵੀਤਾ ਵਾਲਾ ਇੱਕ ਚੁੰਬਕੀ ਖੇਤਰ ਬਣਦਾ ਹੈ;
- ਇੱਕ ਪਾਵਰ ਪਲਾਂਟ ਜੋ ਸ਼ਕਤੀਸ਼ਾਲੀ ਚੁੰਬਕਾਂ ਨੂੰ ਸਰਗਰਮ ਕਰਨ ਦੇ ਸਮਰੱਥ ਇੱਕ ਕਰੰਟ ਪੈਦਾ ਕਰਦਾ ਹੈ।
ਆਓ ਵਿਚਾਰ ਕਰੀਏ ਕਿ ਉਹਨਾਂ ਵਿੱਚੋਂ ਹਰੇਕ ਦੀ ਵਿਸ਼ੇਸ਼ਤਾ ਕੀ ਹੈ, ਅਤੇ ਫਿਰ ਅਸੀਂ ਕਾਰ ਦੇ ਡੈਂਪਰ ਸਿਸਟਮ ਦੇ ਚੁੰਬਕੀ ਸੰਸਕਰਣ ਦੇ ਫਾਇਦਿਆਂ ਅਤੇ ਨੁਕਸਾਨਾਂ ਬਾਰੇ ਚਰਚਾ ਕਰਾਂਗੇ. ਇਸ ਤੋਂ ਪਹਿਲਾਂ ਕਿ ਅਸੀਂ ਸ਼ੁਰੂ ਕਰੀਏ, ਇਹ ਸਪੱਸ਼ਟ ਕਰਨ ਯੋਗ ਹੈ ਕਿ ਕੋਈ ਵੀ ਸਿਸਟਮ ਕਾਰਪੋਰੇਟ ਜਾਸੂਸੀ ਦਾ ਉਤਪਾਦ ਨਹੀਂ ਹੈ। ਹਰੇਕ ਵਿਕਾਸ ਇੱਕ ਵਿਅਕਤੀਗਤ ਤੌਰ 'ਤੇ ਵਿਕਸਤ ਸੰਕਲਪ ਹੈ ਜਿਸਦਾ ਆਟੋਮੋਟਿਵ ਉਦਯੋਗ ਦੀ ਦੁਨੀਆ ਵਿੱਚ ਮੌਜੂਦਗੀ ਦਾ ਅਧਿਕਾਰ ਹੈ।
SKF ਚੁੰਬਕੀ ਮੁਅੱਤਲ
SKF ਪੇਸ਼ੇਵਰ ਵਾਹਨਾਂ ਦੀ ਮੁਰੰਮਤ ਲਈ ਆਟੋ ਪਾਰਟਸ ਦਾ ਇੱਕ ਸਵੀਡਿਸ਼ ਨਿਰਮਾਤਾ ਹੈ। ਇਸ ਬ੍ਰਾਂਡ ਦੇ ਚੁੰਬਕੀ ਸਦਮਾ ਸੋਖਕ ਦਾ ਡਿਜ਼ਾਈਨ ਜਿੰਨਾ ਸੰਭਵ ਹੋ ਸਕੇ ਸਧਾਰਨ ਹੈ. ਇਹਨਾਂ ਸਪਰਿੰਗ ਅਤੇ ਗਿੱਲੇ ਹਿੱਸਿਆਂ ਦੇ ਉਪਕਰਣ ਵਿੱਚ ਹੇਠ ਲਿਖੇ ਤੱਤ ਸ਼ਾਮਲ ਹੁੰਦੇ ਹਨ:
- ਕੈਪਸੂਲ;
- ਦੋ ਇਲੈਕਟ੍ਰੋਮੈਗਨੇਟ;
- ਡੈਂਪਰ ਸਟੈਮ;
- ਬਸੰਤ.
ਅਜਿਹੇ ਸਿਸਟਮ ਦੇ ਸੰਚਾਲਨ ਦਾ ਸਿਧਾਂਤ ਹੇਠ ਲਿਖੇ ਅਨੁਸਾਰ ਹੈ. ਜਦੋਂ ਕਾਰ ਦਾ ਇਲੈਕਟ੍ਰੀਕਲ ਸਿਸਟਮ ਚਾਲੂ ਹੁੰਦਾ ਹੈ, ਤਾਂ ਕੈਪਸੂਲ ਵਿੱਚ ਸਥਿਤ ਇਲੈਕਟ੍ਰੋਮੈਗਨੇਟ ਸਰਗਰਮ ਹੋ ਜਾਂਦੇ ਹਨ। ਚੁੰਬਕੀ ਖੇਤਰ ਦੇ ਇੱਕੋ ਜਿਹੇ ਖੰਭਿਆਂ ਕਾਰਨ, ਇਹ ਤੱਤ ਇੱਕ ਦੂਜੇ ਤੋਂ ਦੂਰ ਹੁੰਦੇ ਹਨ। ਇਸ ਮੋਡ ਵਿੱਚ, ਡਿਵਾਈਸ ਇੱਕ ਸਪਰਿੰਗ ਵਾਂਗ ਕੰਮ ਕਰਦੀ ਹੈ - ਇਹ ਕਾਰ ਦੇ ਸਰੀਰ ਨੂੰ ਪਹੀਏ 'ਤੇ ਲੇਟਣ ਦੀ ਇਜਾਜ਼ਤ ਨਹੀਂ ਦਿੰਦੀ.

ਜਦੋਂ ਕਾਰ ਸੜਕ 'ਤੇ ਚਲਦੀ ਹੈ, ਤਾਂ ਹਰੇਕ ਪਹੀਏ 'ਤੇ ਸੈਂਸਰ ECU ਨੂੰ ਸਿਗਨਲ ਭੇਜਦੇ ਹਨ। ਇਹਨਾਂ ਡੇਟਾ ਦੇ ਅਧਾਰ ਤੇ, ਕੰਟਰੋਲ ਯੂਨਿਟ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਤਾਕਤ ਨੂੰ ਬਦਲਦਾ ਹੈ, ਜਿਸ ਨਾਲ ਸਟਰਟ ਦੀ ਯਾਤਰਾ ਵਧਦੀ ਹੈ, ਅਤੇ ਮੁਅੱਤਲ ਇੱਕ ਸਪੋਰਟੀ ਤੋਂ ਕਲਾਸਿਕ ਨਰਮ ਬਣ ਜਾਂਦਾ ਹੈ। ਕੰਟਰੋਲ ਯੂਨਿਟ ਸਟਰਟ ਰਾਡ ਦੀ ਲੰਬਕਾਰੀ ਗਤੀ ਨੂੰ ਵੀ ਨਿਯੰਤਰਿਤ ਕਰਦਾ ਹੈ, ਜੋ ਇਹ ਪ੍ਰਭਾਵ ਨਹੀਂ ਦਿੰਦਾ ਹੈ ਕਿ ਕਾਰ ਇਕੱਲੇ ਸਪ੍ਰਿੰਗਸ ਦੁਆਰਾ ਚਲਾਈ ਜਾ ਰਹੀ ਹੈ।
ਸਪਰਿੰਗ ਪ੍ਰਭਾਵ ਨਾ ਸਿਰਫ਼ ਮੈਗਨੇਟ ਦੇ ਘਿਣਾਉਣੇ ਗੁਣਾਂ ਦੁਆਰਾ ਪ੍ਰਦਾਨ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਬਲਕਿ ਬਸੰਤ ਦੁਆਰਾ, ਜੋ ਕਿ ਪਾਵਰ ਆਊਟੇਜ ਦੀ ਸਥਿਤੀ ਵਿੱਚ ਰੈਕ 'ਤੇ ਸਥਾਪਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ। ਨਾਲ ਹੀ, ਇਹ ਤੱਤ ਤੁਹਾਨੂੰ ਮੈਗਨੇਟ ਨੂੰ ਬੰਦ ਕਰਨ ਦੀ ਇਜਾਜ਼ਤ ਦਿੰਦਾ ਹੈ ਜਦੋਂ ਵਾਹਨ ਨੂੰ ਇੱਕ ਅਕਿਰਿਆਸ਼ੀਲ ਆਨ-ਬੋਰਡ ਸਿਸਟਮ ਨਾਲ ਪਾਰਕ ਕੀਤਾ ਜਾਂਦਾ ਹੈ।
ਇਸ ਕਿਸਮ ਦੇ ਮੁਅੱਤਲ ਦਾ ਨੁਕਸਾਨ ਇਹ ਹੈ ਕਿ ਇਹ ਬਹੁਤ ਜ਼ਿਆਦਾ ਊਰਜਾ ਦੀ ਖਪਤ ਕਰਦਾ ਹੈ, ਕਿਉਂਕਿ ECU ਲਗਾਤਾਰ ਚੁੰਬਕ ਕੋਇਲਾਂ ਵਿੱਚ ਵੋਲਟੇਜ ਨੂੰ ਬਦਲਦਾ ਹੈ ਤਾਂ ਜੋ ਸਿਸਟਮ ਸੜਕ 'ਤੇ ਸਥਿਤੀ ਨੂੰ ਤੇਜ਼ੀ ਨਾਲ ਅਨੁਕੂਲ ਬਣਾ ਸਕੇ। ਪਰ ਜੇ ਅਸੀਂ ਕੁਝ ਅਟੈਚਮੈਂਟਾਂ (ਉਦਾਹਰਨ ਲਈ, ਇੱਕ ਏਅਰ ਕੰਡੀਸ਼ਨਿੰਗ ਸਿਸਟਮ ਅਤੇ ਇੱਕ ਕੰਮ ਕਰਨ ਵਾਲੇ ਅੰਦਰੂਨੀ ਹੀਟਿੰਗ ਦੇ ਨਾਲ) ਦੇ ਨਾਲ ਇਸ ਮੁਅੱਤਲ ਦੇ "ਗਲਟਨੀ" ਦੀ ਤੁਲਨਾ ਕਰਦੇ ਹਾਂ, ਤਾਂ ਇਹ ਬਹੁਤ ਜ਼ਿਆਦਾ ਬਿਜਲੀ ਦੀ ਖਪਤ ਨਹੀਂ ਕਰਦਾ ਹੈ. ਮੁੱਖ ਗੱਲ ਇਹ ਹੈ ਕਿ ਮਸ਼ੀਨ ਵਿੱਚ ਇੱਕ ਢੁਕਵੀਂ ਸ਼ਕਤੀ ਵਾਲਾ ਜਨਰੇਟਰ ਲਗਾਇਆ ਗਿਆ ਹੈ (ਇਹ ਵਿਧੀ ਕੀ ਕੰਮ ਕਰਦੀ ਹੈ ਇਸ ਬਾਰੇ ਦੱਸਿਆ ਗਿਆ ਹੈ ਇੱਥੇ).
ਡੇਲਫੀ ਮੁਅੱਤਲ
ਅਮਰੀਕੀ ਕੰਪਨੀ ਡੇਲਫੀ ਦੁਆਰਾ ਵਿਕਸਿਤ ਕੀਤੇ ਗਏ ਮੁਅੱਤਲ ਦੁਆਰਾ ਨਵੇਂ ਡੈਂਪਿੰਗ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਦੀ ਪੇਸ਼ਕਸ਼ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। ਬਾਹਰੋਂ, ਇਹ ਕਲਾਸਿਕ ਮੈਕਫਰਸਨ ਸਟੈਂਡ ਵਰਗਾ ਹੈ। ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਸ ਦਾ ਪ੍ਰਭਾਵ ਸਿਰਫ ਸਦਮਾ ਸ਼ੋਸ਼ਕ ਦੀਆਂ ਖੋਖਿਆਂ ਵਿੱਚ ਸਥਿਤ ਚੁੰਬਕੀ ਰੀਓਲੋਜੀਕਲ ਤਰਲ ਦੇ ਗੁਣਾਂ 'ਤੇ ਹੀ ਹੁੰਦਾ ਹੈ। ਇਸ ਸਧਾਰਨ ਡਿਜ਼ਾਈਨ ਦੇ ਬਾਵਜੂਦ, ਇਸ ਕਿਸਮ ਦਾ ਮੁਅੱਤਲ ਕੰਟਰੋਲ ਯੂਨਿਟ ਤੋਂ ਸਿਗਨਲਾਂ 'ਤੇ ਨਿਰਭਰ ਕਰਦੇ ਹੋਏ ਡੈਂਪਰਾਂ ਦੀ ਕਠੋਰਤਾ ਦਾ ਸ਼ਾਨਦਾਰ ਅਨੁਕੂਲਨ ਦਿਖਾਉਂਦਾ ਹੈ।
ਵੇਰੀਏਬਲ ਕਠੋਰਤਾ ਵਾਲੇ ਹਾਈਡ੍ਰੌਲਿਕ ਹਮਰੁਤਬਾ ਦੇ ਮੁਕਾਬਲੇ, ਇਹ ਸੋਧ ਬਹੁਤ ਤੇਜ਼ੀ ਨਾਲ ਜਵਾਬ ਦਿੰਦੀ ਹੈ। ਮੈਗਨੇਟ ਦਾ ਕੰਮ ਸਿਰਫ ਕੰਮ ਕਰਨ ਵਾਲੇ ਪਦਾਰਥ ਦੀ ਲੇਸ ਨੂੰ ਬਦਲਦਾ ਹੈ। ਜਿੱਥੋਂ ਤੱਕ ਸਪਰਿੰਗ ਤੱਤ ਦਾ ਸਬੰਧ ਹੈ, ਇਸਦੀ ਕਠੋਰਤਾ ਨੂੰ ਬਦਲਣ ਦੀ ਲੋੜ ਨਹੀਂ ਹੈ। ਇਸ ਦਾ ਕੰਮ ਅਸਮਾਨ ਸਤਹਾਂ 'ਤੇ ਤੇਜ਼ੀ ਨਾਲ ਗੱਡੀ ਚਲਾਉਣ ਵੇਲੇ ਪਹੀਏ ਨੂੰ ਜਿੰਨੀ ਜਲਦੀ ਹੋ ਸਕੇ ਸੜਕ 'ਤੇ ਵਾਪਸ ਕਰਨਾ ਹੈ। ਇਲੈਕਟ੍ਰੋਨਿਕਸ ਦੇ ਕੰਮ ਕਰਨ ਦੇ ਤਰੀਕੇ 'ਤੇ ਨਿਰਭਰ ਕਰਦੇ ਹੋਏ, ਸਿਸਟਮ ਝਟਕੇ ਨੂੰ ਸੋਖਣ ਵਾਲੇ ਤਰਲ ਨੂੰ ਤੁਰੰਤ ਹੋਰ ਤਰਲ ਬਣਾਉਣ ਦੇ ਯੋਗ ਹੁੰਦਾ ਹੈ ਤਾਂ ਜੋ ਡੈਂਪਰ ਰਾਡ ਤੇਜ਼ੀ ਨਾਲ ਅੱਗੇ ਵਧੇ।

ਇਹ ਮੁਅੱਤਲ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਨਾਗਰਿਕ ਵਾਹਨਾਂ ਲਈ ਬਹੁਤ ਘੱਟ ਵਿਹਾਰਕਤਾ ਵਾਲੀਆਂ ਹਨ। ਮੋਟਰਸਪੋਰਟ ਵਿੱਚ ਇੱਕ ਸੈਕਿੰਡ ਦੇ ਅੰਸ਼ ਇੱਕ ਮਹੱਤਵਪੂਰਨ ਭੂਮਿਕਾ ਨਿਭਾਉਂਦੇ ਹਨ। ਸਿਸਟਮ ਨੂੰ ਆਪਣੇ ਆਪ ਵਿੱਚ ਓਨੀ ਊਰਜਾ ਦੀ ਲੋੜ ਨਹੀਂ ਹੁੰਦੀ ਜਿੰਨੀ ਪਿਛਲੀ ਕਿਸਮ ਦੇ ਡੈਂਪਰਾਂ ਦੇ ਮਾਮਲੇ ਵਿੱਚ. ਅਜਿਹੀ ਪ੍ਰਣਾਲੀ ਨੂੰ ਪਹੀਆਂ ਅਤੇ ਮੁਅੱਤਲ ਢਾਂਚੇ ਦੇ ਤੱਤਾਂ 'ਤੇ ਸਥਿਤ ਵੱਖ-ਵੱਖ ਸੈਂਸਰਾਂ ਤੋਂ ਆਉਣ ਵਾਲੇ ਡੇਟਾ ਦੇ ਆਧਾਰ 'ਤੇ ਵੀ ਨਿਯੰਤਰਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ।
ਇਹ ਵਿਕਾਸ ਪਹਿਲਾਂ ਹੀ ਔਡੀ ਅਤੇ ਜੀਐਮ (ਕੁਝ ਕੈਡਿਲੈਕ ਅਤੇ ਸ਼ੇਵਰਲੇਟ ਮਾਡਲਾਂ) ਵਰਗੇ ਬ੍ਰਾਂਡਾਂ ਦੇ ਅਨੁਕੂਲਿਤ ਮੁਅੱਤਲ ਵਿੱਚ ਸਰਗਰਮੀ ਨਾਲ ਵਰਤਿਆ ਗਿਆ ਹੈ।
ਬੋਸ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਮੁਅੱਤਲ
ਬੋਸ ਬ੍ਰਾਂਡ ਬਹੁਤ ਸਾਰੇ ਵਾਹਨ ਚਾਲਕਾਂ ਨੂੰ ਇਸਦੇ ਪ੍ਰੀਮੀਅਮ ਸਪੀਕਰ ਪ੍ਰਣਾਲੀਆਂ ਲਈ ਜਾਣਿਆ ਜਾਂਦਾ ਹੈ। ਪਰ ਉੱਚ-ਗੁਣਵੱਤਾ ਦੀ ਆਡੀਓ ਤਿਆਰੀ ਤੋਂ ਇਲਾਵਾ, ਕੰਪਨੀ ਸਭ ਤੋਂ ਸ਼ਾਨਦਾਰ ਕਿਸਮ ਦੇ ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਦੇ ਵਿਕਾਸ 'ਤੇ ਵੀ ਕੰਮ ਕਰ ਰਹੀ ਹੈ। ਵੀਹਵੀਂ ਸਦੀ ਦੇ ਅੰਤ ਤੱਕ, ਇੱਕ ਪ੍ਰੋਫ਼ੈਸਰ ਜੋ ਸ਼ਾਨਦਾਰ ਧੁਨੀ ਵਿਗਿਆਨ ਬਣਾਉਂਦਾ ਹੈ, ਇੱਕ ਪੂਰੀ ਤਰ੍ਹਾਂ ਨਾਲ ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਬਣਾਉਣ ਦੇ ਵਿਚਾਰ ਨਾਲ "ਲਾਗ" ਵੀ ਹੈ।
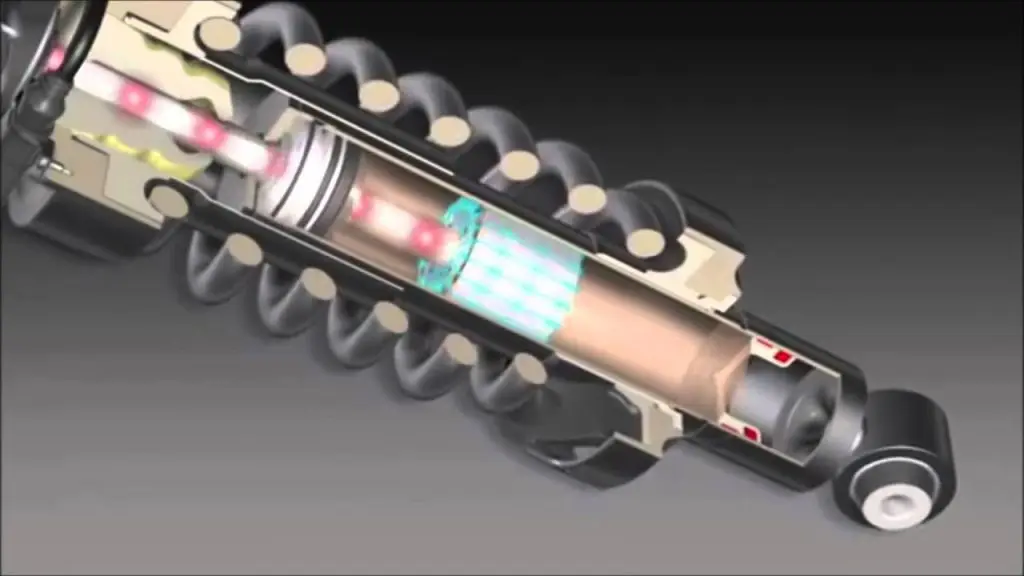
ਇਸਦੇ ਵਿਕਾਸ ਦਾ ਡਿਜ਼ਾਇਨ ਉਸੇ ਰਾਡ ਸਦਮਾ ਸ਼ੋਸ਼ਕ ਵਰਗਾ ਹੈ, ਅਤੇ ਡਿਵਾਈਸ ਵਿੱਚ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟ ਸਿਧਾਂਤ ਦੇ ਅਨੁਸਾਰ ਸਥਾਪਿਤ ਕੀਤੇ ਗਏ ਹਨ, ਜਿਵੇਂ ਕਿ SKF ਸੋਧ ਵਿੱਚ. ਸਿਰਫ ਉਹ ਇੱਕ ਦੂਜੇ ਨੂੰ ਨਹੀਂ ਰੋਕਦੇ, ਜਿਵੇਂ ਕਿ ਪਹਿਲੇ ਸੰਸਕਰਣ ਵਿੱਚ. ਇਲੈਕਟ੍ਰੋਮੈਗਨੇਟ ਖੁਦ ਡੰਡੇ ਅਤੇ ਸਰੀਰ ਦੀ ਪੂਰੀ ਲੰਬਾਈ ਦੇ ਨਾਲ ਸਥਿਤ ਹੁੰਦੇ ਹਨ, ਜਿਸ ਦੇ ਅੰਦਰ ਇਹ ਚਲਦਾ ਹੈ, ਅਤੇ ਚੁੰਬਕੀ ਖੇਤਰ ਨੂੰ ਵੱਧ ਤੋਂ ਵੱਧ ਕੀਤਾ ਜਾਂਦਾ ਹੈ ਅਤੇ ਪਲੱਸ ਦੀ ਗਿਣਤੀ ਵਧ ਜਾਂਦੀ ਹੈ।
ਅਜਿਹੀ ਸਥਾਪਨਾ ਦੀ ਵਿਸ਼ੇਸ਼ਤਾ ਇਹ ਹੈ ਕਿ ਇਸ ਨੂੰ ਬਹੁਤ ਜ਼ਿਆਦਾ ਊਰਜਾ ਦੀ ਲੋੜ ਨਹੀਂ ਹੁੰਦੀ ਹੈ. ਇਹ ਇੱਕੋ ਸਮੇਂ ਇੱਕ ਡੈਂਪਰ ਅਤੇ ਸਪਰਿੰਗ ਦੋਨਾਂ ਦਾ ਕੰਮ ਵੀ ਕਰਦਾ ਹੈ, ਅਤੇ ਇਹ ਇੱਕ ਸਥਿਰ (ਕਾਰ ਸਥਿਰ ਹੈ) ਅਤੇ ਇੱਕ ਗਤੀਸ਼ੀਲ (ਕਾਰ ਇੱਕ ਉੱਚੀ ਸੜਕ ਦੇ ਨਾਲ ਅੱਗੇ ਵਧ ਰਹੀ ਹੈ) ਮੋਡ ਵਿੱਚ ਕੰਮ ਕਰਦਾ ਹੈ।

ਸਿਸਟਮ ਆਪਣੇ ਆਪ ਵਿੱਚ ਵੱਡੀ ਗਿਣਤੀ ਵਿੱਚ ਪ੍ਰਕਿਰਿਆਵਾਂ ਦਾ ਨਿਯੰਤਰਣ ਪ੍ਰਦਾਨ ਕਰਦਾ ਹੈ ਜੋ ਕਾਰ ਚਲਾਉਂਦੇ ਸਮੇਂ ਵਾਪਰਦੀਆਂ ਹਨ। ਚੁੰਬਕੀ ਖੇਤਰ ਦੇ ਖੰਭਿਆਂ ਵਿੱਚ ਇੱਕ ਤਿੱਖੀ ਤਬਦੀਲੀ ਦੇ ਕਾਰਨ ਔਸਿਲੇਸ਼ਨਾਂ ਦਾ ਡੈਂਪਿੰਗ ਹੁੰਦਾ ਹੈ। ਬੋਸ ਸਿਸਟਮ ਨੂੰ ਅਜਿਹੇ ਸਾਰੇ ਮੁਅੱਤਲ ਡਿਜ਼ਾਈਨਾਂ ਦਾ ਬੈਂਚਮਾਰਕ ਮੰਨਿਆ ਜਾਂਦਾ ਹੈ। ਇਹ ਵੀਹ ਸੈਂਟੀਮੀਟਰ ਤੱਕ ਡੰਡੇ ਦਾ ਇੱਕ ਪ੍ਰਭਾਵਸ਼ਾਲੀ ਸਟ੍ਰੋਕ ਪ੍ਰਦਾਨ ਕਰਨ ਦੇ ਯੋਗ ਹੈ, ਸਰੀਰ ਨੂੰ ਪੂਰੀ ਤਰ੍ਹਾਂ ਸਥਿਰ ਕਰਦਾ ਹੈ, ਹਾਈ-ਸਪੀਡ ਕਾਰਨਰਿੰਗ ਦੇ ਦੌਰਾਨ ਮਾਮੂਲੀ ਰੋਲ ਨੂੰ ਵੀ ਖਤਮ ਕਰਦਾ ਹੈ, ਅਤੇ ਨਾਲ ਹੀ ਬ੍ਰੇਕਿੰਗ ਦੌਰਾਨ "ਪੈਕਿੰਗ" ਵੀ ਕਰਦਾ ਹੈ।
ਇਸ ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਦੀ ਜਾਂਚ ਜਾਪਾਨੀ ਆਟੋਮੇਕਰ ਲੈਕਸਸ ਐਲਐਸ ਦੇ ਫਲੈਗਸ਼ਿਪ ਮਾਡਲ 'ਤੇ ਕੀਤੀ ਗਈ ਸੀ, ਜਿਸ ਨੂੰ, ਹਾਲ ਹੀ ਵਿੱਚ ਰੀਸਟਾਇਲ ਕੀਤਾ ਗਿਆ ਸੀ (ਪ੍ਰੀਮੀਅਮ ਸੇਡਾਨ ਦੇ ਪਿਛਲੇ ਸੰਸਕਰਣਾਂ ਵਿੱਚੋਂ ਇੱਕ ਦੀ ਇੱਕ ਟੈਸਟ ਡਰਾਈਵ ਪੇਸ਼ ਕੀਤੀ ਗਈ ਸੀ। ਇਕ ਹੋਰ ਲੇਖ ਵਿਚ). ਇਸ ਤੱਥ ਦੇ ਬਾਵਜੂਦ ਕਿ ਇਸ ਮਾਡਲ ਨੇ ਪਹਿਲਾਂ ਹੀ ਇੱਕ ਉੱਚ-ਗੁਣਵੱਤਾ ਮੁਅੱਤਲ ਪ੍ਰਾਪਤ ਕੀਤਾ ਹੈ, ਜੋ ਕਿ ਨਿਰਵਿਘਨ ਕਾਰਵਾਈ ਦੁਆਰਾ ਦਰਸਾਇਆ ਗਿਆ ਹੈ, ਚੁੰਬਕੀ ਪ੍ਰਣਾਲੀ ਦੀ ਪੇਸ਼ਕਾਰੀ ਦੇ ਦੌਰਾਨ, ਆਟੋ ਪੱਤਰਕਾਰਾਂ ਦੀ ਪ੍ਰਸ਼ੰਸਾ ਵੱਲ ਧਿਆਨ ਨਾ ਦੇਣਾ ਅਸੰਭਵ ਸੀ.
ਨਿਰਮਾਤਾ ਨੇ ਇਸ ਸਿਸਟਮ ਨੂੰ ਕਈ ਓਪਰੇਟਿੰਗ ਮੋਡਾਂ ਅਤੇ ਵੱਡੀ ਗਿਣਤੀ ਵਿੱਚ ਵੱਖ-ਵੱਖ ਸੈਟਿੰਗਾਂ ਨਾਲ ਲੈਸ ਕੀਤਾ ਹੈ। ਉਦਾਹਰਨ ਲਈ, ਜਦੋਂ ਕਾਰ ਤੇਜ਼ ਰਫ਼ਤਾਰ 'ਤੇ ਖੜ੍ਹੀ ਹੁੰਦੀ ਹੈ, ਤਾਂ ਮੁਅੱਤਲ ECU ਵਾਹਨ ਦੀ ਗਤੀ, ਬਾਡੀ ਰੋਲ ਦੀ ਸ਼ੁਰੂਆਤ ਨੂੰ ਰਿਕਾਰਡ ਕਰਦਾ ਹੈ। ਸੈਂਸਰਾਂ ਤੋਂ ਸਿਗਨਲਾਂ 'ਤੇ ਨਿਰਭਰ ਕਰਦੇ ਹੋਏ, ਵਧੇਰੇ ਲੋਡ ਕੀਤੇ ਪਹੀਆਂ ਵਿੱਚੋਂ ਇੱਕ ਦੇ ਰੈਕ ਨੂੰ ਜ਼ਿਆਦਾ ਹੱਦ ਤੱਕ ਬਿਜਲੀ ਸਪਲਾਈ ਕੀਤੀ ਜਾਂਦੀ ਹੈ (ਜ਼ਿਆਦਾਤਰ ਇਹ ਸਾਹਮਣੇ ਵਾਲਾ ਪਹੀਆ ਹੁੰਦਾ ਹੈ, ਜੋ ਰੋਟੇਸ਼ਨ ਦੇ ਅਰਧ ਚੱਕਰ ਦੇ ਬਾਹਰੀ ਟ੍ਰੈਜੈਕਟਰੀ 'ਤੇ ਸਥਿਤ ਹੁੰਦਾ ਹੈ)। ਨਤੀਜੇ ਵਜੋਂ, ਬਾਹਰੀ ਪਿਛਲਾ ਪਹੀਆ ਵੀ ਸਪੋਰਟ ਵ੍ਹੀਲ ਬਣ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਕਾਰ ਸੜਕ ਦੀ ਸਤ੍ਹਾ 'ਤੇ ਪਕੜ ਬਣਾਈ ਰੱਖਦੀ ਹੈ।
ਬੋਸ ਦੇ ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਦੀ ਇੱਕ ਹੋਰ ਵਿਸ਼ੇਸ਼ਤਾ ਇਹ ਹੈ ਕਿ ਇਹ ਇੱਕ ਸੈਕੰਡਰੀ ਜਨਰੇਟਰ ਵਜੋਂ ਵੀ ਕੰਮ ਕਰ ਸਕਦਾ ਹੈ। ਜਦੋਂ ਸਦਮਾ ਸੋਖਣ ਵਾਲਾ ਡੰਡਾ ਹਿਲਦਾ ਹੈ, ਤਾਂ ਸੰਬੰਧਿਤ ਰਿਕਵਰੀ ਸਿਸਟਮ ਜਾਰੀ ਕੀਤੀ ਊਰਜਾ ਨੂੰ ਸੰਚਵਕ ਵਿੱਚ ਇਕੱਠਾ ਕਰਦਾ ਹੈ। ਇਹ ਸੰਭਵ ਹੈ ਕਿ ਇਸ ਵਿਕਾਸ ਨੂੰ ਹੋਰ ਆਧੁਨਿਕ ਕੀਤਾ ਜਾਵੇਗਾ. ਇਸ ਤੱਥ ਦੇ ਬਾਵਜੂਦ ਕਿ ਇਸ ਕਿਸਮ ਦਾ ਮੁਅੱਤਲ ਸਿਧਾਂਤਕ ਤੌਰ 'ਤੇ ਸਭ ਤੋਂ ਵੱਧ ਕੁਸ਼ਲ ਹੈ, ਹੁਣ ਤੱਕ ਸਭ ਤੋਂ ਮੁਸ਼ਕਲ ਕੰਮ ਕੰਟਰੋਲ ਯੂਨਿਟ ਨੂੰ ਪ੍ਰੋਗਰਾਮ ਕਰਨਾ ਹੈ ਤਾਂ ਜੋ ਮਕੈਨਿਜ਼ਮ ਡਰਾਇੰਗ ਵਿੱਚ ਵਰਣਿਤ ਸਿਸਟਮ ਦੀ ਪੂਰੀ ਸਮਰੱਥਾ ਦਾ ਅਹਿਸਾਸ ਕਰ ਸਕੇ।
ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਦੀ ਦਿੱਖ ਲਈ ਸੰਭਾਵਨਾ
ਇਸਦੀ ਸਪੱਸ਼ਟ ਪ੍ਰਭਾਵਸ਼ੀਲਤਾ ਦੇ ਬਾਵਜੂਦ, ਇੱਕ ਪੂਰਨ ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਅਜੇ ਤੱਕ ਵੱਡੇ ਉਤਪਾਦਨ ਵਿੱਚ ਦਾਖਲ ਨਹੀਂ ਹੋਇਆ ਹੈ। ਇਸ ਸਮੇਂ, ਇਸ ਵਿੱਚ ਮੁੱਖ ਰੁਕਾਵਟ ਲਾਗਤ ਪਹਿਲੂ ਅਤੇ ਪ੍ਰੋਗਰਾਮਿੰਗ ਵਿੱਚ ਜਟਿਲਤਾ ਹੈ। ਕ੍ਰਾਂਤੀਕਾਰੀ ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਬਹੁਤ ਮਹਿੰਗਾ ਹੈ, ਅਤੇ ਇਹ ਅਜੇ ਤੱਕ ਪੂਰੀ ਤਰ੍ਹਾਂ ਵਿਕਸਤ ਨਹੀਂ ਹੋਇਆ ਹੈ (ਉਚਿਤ ਸੌਫਟਵੇਅਰ ਬਣਾਉਣਾ ਮੁਸ਼ਕਲ ਹੈ, ਕਿਉਂਕਿ ਇਸਦੀ ਪੂਰੀ ਸਮਰੱਥਾ ਨੂੰ ਮਹਿਸੂਸ ਕਰਨ ਲਈ ਮਾਈਕ੍ਰੋਪ੍ਰੋਸੈਸਰ ਵਿੱਚ ਵੱਡੀ ਗਿਣਤੀ ਵਿੱਚ ਐਲਗੋਰਿਦਮ ਨੂੰ ਸਰਗਰਮ ਕਰਨਾ ਲਾਜ਼ਮੀ ਹੈ)। ਪਰ ਪਹਿਲਾਂ ਹੀ ਹੁਣ ਆਧੁਨਿਕ ਵਾਹਨਾਂ ਵਿੱਚ ਵਿਚਾਰ ਨੂੰ ਲਾਗੂ ਕਰਨ ਲਈ ਇੱਕ ਸਕਾਰਾਤਮਕ ਰੁਝਾਨ ਹੈ.
ਕਿਸੇ ਵੀ ਨਵੀਂ ਤਕਨੀਕ ਨੂੰ ਫੰਡਿੰਗ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ। ਇੱਕ ਨਵੀਨਤਾ ਨੂੰ ਵਿਕਸਤ ਕਰਨਾ ਅਸੰਭਵ ਹੈ ਅਤੇ ਇਸਨੂੰ ਸ਼ੁਰੂਆਤੀ ਟੈਸਟਾਂ ਤੋਂ ਬਿਨਾਂ ਤੁਰੰਤ ਉਤਪਾਦਨ ਵਿੱਚ ਸ਼ਾਮਲ ਕਰਨਾ ਅਸੰਭਵ ਹੈ, ਅਤੇ ਇੰਜਨੀਅਰਾਂ ਅਤੇ ਪ੍ਰੋਗਰਾਮਰਾਂ ਦੇ ਕੰਮ ਤੋਂ ਇਲਾਵਾ, ਇਸ ਪ੍ਰਕਿਰਿਆ ਲਈ ਵੱਡੇ ਨਿਵੇਸ਼ਾਂ ਦੀ ਵੀ ਲੋੜ ਹੁੰਦੀ ਹੈ. ਪਰ ਜਿਵੇਂ ਹੀ ਵਿਕਾਸ ਨੂੰ ਕਨਵੇਅਰ 'ਤੇ ਰੱਖਿਆ ਜਾਂਦਾ ਹੈ, ਇਸ ਦਾ ਡਿਜ਼ਾਈਨ ਹੌਲੀ-ਹੌਲੀ ਸਰਲ ਹੋ ਜਾਵੇਗਾ, ਜਿਸ ਨਾਲ ਅਜਿਹੇ ਉਪਕਰਣ ਨੂੰ ਨਾ ਸਿਰਫ ਪ੍ਰੀਮੀਅਮ ਕਾਰਾਂ ਵਿੱਚ, ਬਲਕਿ ਮੱਧ ਕੀਮਤ ਵਾਲੇ ਹਿੱਸੇ ਦੇ ਮਾਡਲਾਂ ਵਿੱਚ ਵੀ ਦੇਖਣਾ ਸੰਭਵ ਹੋ ਜਾਵੇਗਾ।
ਇਹ ਸੰਭਵ ਹੈ ਕਿ ਸਮੇਂ ਦੇ ਨਾਲ ਪ੍ਰਣਾਲੀਆਂ ਵਿੱਚ ਸੁਧਾਰ ਹੋਵੇਗਾ, ਜੋ ਪਹੀਆ ਵਾਹਨਾਂ ਨੂੰ ਵਧੇਰੇ ਆਰਾਮਦਾਇਕ ਅਤੇ ਸੁਰੱਖਿਅਤ ਬਣਾ ਦੇਵੇਗਾ। ਇਲੈਕਟ੍ਰੋਮੈਗਨੇਟ ਦੀ ਪਰਸਪਰ ਕ੍ਰਿਆ 'ਤੇ ਆਧਾਰਿਤ ਮਕੈਨਿਜ਼ਮ ਹੋਰ ਵਾਹਨ ਡਿਜ਼ਾਈਨਾਂ ਵਿੱਚ ਵੀ ਵਰਤੇ ਜਾ ਸਕਦੇ ਹਨ। ਉਦਾਹਰਨ ਲਈ, ਟਰੱਕ ਚਲਾਉਂਦੇ ਸਮੇਂ ਆਰਾਮ ਵਧਾਉਣ ਲਈ, ਡਰਾਈਵਰ ਦੀ ਸੀਟ ਵਾਯੂਮੈਟਿਕ ਨਹੀਂ, ਪਰ ਇੱਕ ਚੁੰਬਕੀ ਗੱਦੀ 'ਤੇ ਅਧਾਰਤ ਹੋ ਸਕਦੀ ਹੈ।
ਜਿਵੇਂ ਕਿ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਸਸਪੈਂਸ਼ਨ ਦੇ ਵਿਕਾਸ ਲਈ, ਅੱਜ ਅਜਿਹੇ ਸੰਬੰਧਿਤ ਪ੍ਰਣਾਲੀਆਂ ਵਿੱਚ ਸੁਧਾਰ ਦੀ ਲੋੜ ਹੈ:
- ਨੇਵੀਗੇਸ਼ਨ ਸਿਸਟਮ. ਇਲੈਕਟ੍ਰੋਨਿਕਸ ਨੂੰ ਸੜਕ ਦੀ ਸਤ੍ਹਾ ਦੀ ਸਥਿਤੀ ਪਹਿਲਾਂ ਤੋਂ ਨਿਰਧਾਰਤ ਕਰਨੀ ਚਾਹੀਦੀ ਹੈ। ਜੀਪੀਐਸ ਨੈਵੀਗੇਟਰ ਦੇ ਡੇਟਾ ਦੇ ਅਧਾਰ ਤੇ ਅਜਿਹਾ ਕਰਨਾ ਸਭ ਤੋਂ ਵਧੀਆ ਹੈ (ਡਿਵਾਈਸ ਓਪਰੇਸ਼ਨ ਦੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਬਾਰੇ ਪੜ੍ਹੋ ਇੱਥੇ). ਅਡੈਪਟਿਵ ਸਸਪੈਂਸ਼ਨ ਮੁਸ਼ਕਲ ਸੜਕੀ ਸਤਹਾਂ (ਕੁਝ ਨੈਵੀਗੇਸ਼ਨ ਸਿਸਟਮ ਸੜਕ ਦੀ ਸਤ੍ਹਾ ਦੀ ਸਥਿਤੀ ਬਾਰੇ ਜਾਣਕਾਰੀ ਪ੍ਰਦਾਨ ਕਰਦੇ ਹਨ) ਜਾਂ ਵੱਡੀ ਗਿਣਤੀ ਵਿੱਚ ਮੋੜਾਂ ਲਈ ਪਹਿਲਾਂ ਤੋਂ ਤਿਆਰ ਕੀਤਾ ਜਾਂਦਾ ਹੈ।
- ਵਾਹਨ ਦੇ ਅੱਗੇ ਵਿਜ਼ਨ ਸਿਸਟਮ. ਇਨਫਰਾਰੈੱਡ ਸੈਂਸਰਾਂ ਅਤੇ ਗ੍ਰਾਫਿਕ ਚਿੱਤਰ ਦੇ ਵਿਸ਼ਲੇਸ਼ਣ ਦੇ ਆਧਾਰ 'ਤੇ ਜੋ ਕਿ ਸਾਹਮਣੇ ਵਾਲੇ ਵੀਡੀਓ ਕੈਮਰੇ ਤੋਂ ਆਉਂਦੀ ਹੈ, ਸਿਸਟਮ ਨੂੰ ਸੜਕ ਦੀ ਸਤ੍ਹਾ ਵਿੱਚ ਤਬਦੀਲੀਆਂ ਦੀ ਪ੍ਰਕਿਰਤੀ ਨੂੰ ਪਹਿਲਾਂ ਤੋਂ ਨਿਰਧਾਰਤ ਕਰਨਾ ਚਾਹੀਦਾ ਹੈ ਅਤੇ ਪ੍ਰਾਪਤ ਜਾਣਕਾਰੀ ਦੇ ਅਨੁਕੂਲ ਹੋਣਾ ਚਾਹੀਦਾ ਹੈ।
ਕੁਝ ਕੰਪਨੀਆਂ ਪਹਿਲਾਂ ਹੀ ਆਪਣੇ ਮਾਡਲਾਂ ਵਿੱਚ ਸਮਾਨ ਪ੍ਰਣਾਲੀਆਂ ਨੂੰ ਲਾਗੂ ਕਰ ਰਹੀਆਂ ਹਨ, ਇਸ ਲਈ ਕਾਰਾਂ ਲਈ ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਦੇ ਆਉਣ ਵਾਲੇ ਵਿਕਾਸ ਵਿੱਚ ਵਿਸ਼ਵਾਸ ਹੈ.
ਤਾਕਤ ਅਤੇ ਕਮਜ਼ੋਰੀਆਂ
ਕਿਸੇ ਵੀ ਹੋਰ ਨਵੀਂ ਵਿਧੀ ਦੀ ਤਰ੍ਹਾਂ ਜੋ ਕਾਰਾਂ ਦੇ ਡਿਜ਼ਾਈਨ (ਜਾਂ ਪਹਿਲਾਂ ਹੀ ਮੋਟਰ ਵਾਹਨਾਂ ਵਿੱਚ ਵਰਤੀ ਜਾਂਦੀ ਹੈ) ਵਿੱਚ ਪੇਸ਼ ਕੀਤੇ ਜਾਣ ਦੀ ਯੋਜਨਾ ਹੈ, ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਮੁਅੱਤਲ ਦੀਆਂ ਸਾਰੀਆਂ ਕਿਸਮਾਂ ਦੇ ਫਾਇਦੇ ਅਤੇ ਨੁਕਸਾਨ ਹਨ।
ਆਓ ਪਹਿਲਾਂ ਫਾਇਦਿਆਂ ਬਾਰੇ ਗੱਲ ਕਰੀਏ. ਇਸ ਸੂਚੀ ਵਿੱਚ ਅਜਿਹੇ ਕਾਰਕ ਸ਼ਾਮਲ ਹਨ:
- ਨਿਰਵਿਘਨ ਸੰਚਾਲਨ ਦੇ ਮਾਮਲੇ ਵਿੱਚ ਸਿਸਟਮ ਦੀਆਂ ਡੈਂਪਿੰਗ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਬੇਮਿਸਾਲ ਹਨ;
- ਡੈਂਪਿੰਗ ਮੋਡਸ ਨੂੰ ਫਾਈਨ-ਟਿਊਨਿੰਗ ਕਰਨ ਨਾਲ, ਡਰਾਈਵਿੰਗ ਸਧਾਰਨ ਡਿਜ਼ਾਈਨ ਦੇ ਰੋਲ ਗੁਣਾਂ ਤੋਂ ਬਿਨਾਂ ਲਗਭਗ ਸੰਪੂਰਨ ਬਣ ਜਾਂਦੀ ਹੈ। ਉਹੀ ਪ੍ਰਭਾਵ ਸੜਕ 'ਤੇ ਵੱਧ ਤੋਂ ਵੱਧ ਪਕੜ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਂਦਾ ਹੈ, ਭਾਵੇਂ ਇਸਦੀ ਗੁਣਵੱਤਾ ਜੋ ਵੀ ਹੋਵੇ;
- ਪ੍ਰਵੇਗ ਅਤੇ ਸਖ਼ਤ ਬ੍ਰੇਕਿੰਗ ਦੇ ਦੌਰਾਨ, ਕਾਰ ਆਪਣੀ ਨੱਕ ਨੂੰ "ਚੱਕ" ਨਹੀਂ ਕਰਦੀ ਅਤੇ ਪਿਛਲੇ ਐਕਸਲ 'ਤੇ ਨਹੀਂ ਬੈਠਦੀ, ਜੋ ਆਮ ਕਾਰਾਂ ਵਿੱਚ ਪਕੜ ਨੂੰ ਗੰਭੀਰਤਾ ਨਾਲ ਪ੍ਰਭਾਵਿਤ ਕਰਦੀ ਹੈ;
- ਟਾਇਰ ਵੀਅਰ ਜ਼ਿਆਦਾ ਹੈ. ਬੇਸ਼ੱਕ, ਜੇਕਰ ਲੀਵਰਾਂ ਦੀ ਜਿਓਮੈਟਰੀ ਅਤੇ ਸਸਪੈਂਸ਼ਨ ਅਤੇ ਚੈਸਿਸ ਦੇ ਹੋਰ ਤੱਤਾਂ ਨੂੰ ਸਹੀ ਢੰਗ ਨਾਲ ਟਿਊਨ ਕੀਤਾ ਗਿਆ ਹੈ (ਕੈਂਬਰ ਬਾਰੇ ਹੋਰ ਵੇਰਵਿਆਂ ਲਈ, ਪੜ੍ਹੋ ਵੱਖਰੇ ਤੌਰ 'ਤੇ);
- ਕਾਰ ਦੀ ਐਰੋਡਾਇਨਾਮਿਕਸ ਵਿੱਚ ਸੁਧਾਰ ਹੋਇਆ ਹੈ, ਕਿਉਂਕਿ ਇਸਦਾ ਸਰੀਰ ਹਮੇਸ਼ਾ ਸੜਕ ਦੇ ਸਮਾਨਾਂਤਰ ਹੁੰਦਾ ਹੈ;
- ਢਾਂਚਾਗਤ ਤੱਤਾਂ ਦੀ ਅਸਮਾਨ ਪਹਿਰਾਵੇ ਨੂੰ ਲੋਡ ਕੀਤੇ / ਅਨਲੋਡ ਕੀਤੇ ਪਹੀਏ ਵਿਚਕਾਰ ਬਲਾਂ ਨੂੰ ਵੰਡ ਕੇ ਖਤਮ ਕੀਤਾ ਜਾਂਦਾ ਹੈ।
ਸਿਧਾਂਤ ਵਿੱਚ, ਸਾਰੇ ਸਕਾਰਾਤਮਕ ਬਿੰਦੂ ਕਿਸੇ ਵੀ ਮੁਅੱਤਲ ਦੇ ਮੁੱਖ ਉਦੇਸ਼ ਨਾਲ ਸਬੰਧਤ ਹਨ. ਹਰੇਕ ਆਟੋਮੇਕਰ ਆਪਣੇ ਉਤਪਾਦਾਂ ਨੂੰ ਜ਼ਿਕਰ ਕੀਤੇ ਆਦਰਸ਼ ਦੇ ਜਿੰਨਾ ਸੰਭਵ ਹੋ ਸਕੇ ਨੇੜੇ ਲਿਆਉਣ ਲਈ ਮੌਜੂਦਾ ਕਿਸਮ ਦੇ ਡੈਂਪਿੰਗ ਪ੍ਰਣਾਲੀਆਂ ਵਿੱਚ ਸੁਧਾਰ ਕਰਨ ਦੀ ਕੋਸ਼ਿਸ਼ ਕਰਦਾ ਹੈ।

ਨੁਕਸਾਨ ਲਈ, ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਸਿਰਫ ਇੱਕ ਹੈ. ਇਹ ਇਸਦੀ ਲਾਗਤ ਹੈ। ਜੇ ਤੁਸੀਂ ਬੋਸ ਤੋਂ ਇੱਕ ਪੂਰੀ ਤਰ੍ਹਾਂ ਵਿਕਸਤ ਵਿਕਾਸ ਨੂੰ ਸਥਾਪਿਤ ਕਰਦੇ ਹੋ, ਤਾਂ ਅੰਦਰੂਨੀ ਦੀ ਘੱਟ ਗੁਣਵੱਤਾ ਅਤੇ ਇਲੈਕਟ੍ਰਾਨਿਕ ਸਿਸਟਮ ਦੀ ਘੱਟੋ-ਘੱਟ ਸੰਰਚਨਾ ਦੇ ਨਾਲ, ਕਾਰ ਦੀ ਕੀਮਤ ਅਜੇ ਵੀ ਬਹੁਤ ਜ਼ਿਆਦਾ ਹੋਵੇਗੀ. ਇੱਕ ਵੀ ਆਟੋਮੇਕਰ ਅਜੇ ਤੱਕ ਅਜਿਹੇ ਮਾਡਲਾਂ ਨੂੰ ਇੱਕ ਲੜੀ (ਇੱਥੋਂ ਤੱਕ ਕਿ ਇੱਕ ਸੀਮਤ ਇੱਕ) ਵਿੱਚ ਪਾਉਣ ਲਈ ਤਿਆਰ ਨਹੀਂ ਹੈ, ਉਮੀਦ ਹੈ ਕਿ ਅਮੀਰ ਤੁਰੰਤ ਇੱਕ ਨਵਾਂ ਉਤਪਾਦ ਖਰੀਦ ਲੈਣਗੇ, ਅਤੇ ਇੱਕ ਕਾਰ ਵਿੱਚ ਕਿਸਮਤ ਦਾ ਨਿਵੇਸ਼ ਕਰਨ ਦਾ ਕੋਈ ਮਤਲਬ ਨਹੀਂ ਹੈ ਜੋ ਗੋਦਾਮਾਂ ਵਿੱਚ ਹੋਵੇਗੀ। . ਵਿਅਕਤੀਗਤ ਆਰਡਰ 'ਤੇ ਅਜਿਹੀਆਂ ਕਾਰਾਂ ਬਣਾਉਣ ਦਾ ਇੱਕੋ ਇੱਕ ਵਿਕਲਪ ਹੈ, ਪਰ ਇਸ ਮਾਮਲੇ ਵਿੱਚ ਵੀ ਕੁਝ ਕੰਪਨੀਆਂ ਹਨ ਜੋ ਅਜਿਹੀ ਸੇਵਾ ਪ੍ਰਦਾਨ ਕਰਨ ਲਈ ਤਿਆਰ ਹਨ।
ਅੰਤ ਵਿੱਚ, ਅਸੀਂ ਇੱਕ ਛੋਟਾ ਵੀਡੀਓ ਦੇਖਣ ਦਾ ਸੁਝਾਅ ਦਿੰਦੇ ਹਾਂ ਕਿ ਕਿਵੇਂ ਬੋਸ ਚੁੰਬਕੀ ਮੁਅੱਤਲ ਕਲਾਸਿਕ ਹਮਰੁਤਬਾ ਦੀ ਤੁਲਨਾ ਵਿੱਚ ਕੰਮ ਕਰਦਾ ਹੈ:

