
ਆਰ ਕੇ ਪੀ ਪੀ - ਰੋਬੋਟਿਕ ਗੀਅਰਬਾਕਸ
ਸਮੱਗਰੀ
ਕੋਈ ਵੀ ਆਧੁਨਿਕ ਕਾਰ ਚਾਲੂ ਅਤੇ ਨਿਰਵਿਘਨ ਚਲਣ ਦੇ ਯੋਗ ਨਹੀਂ ਹੋਵੇਗੀ ਜੇ ਇਸਦੇ ਉਪਕਰਣ ਵਿੱਚ ਕੋਈ ਪ੍ਰਸਾਰਣ ਨਹੀਂ ਹੈ. ਅੱਜ, ਇੱਥੇ ਕਈ ਕਿਸਮਾਂ ਦੇ ਗੇਅਰਬਾਕਸ ਹਨ, ਜੋ ਨਾ ਸਿਰਫ ਡਰਾਈਵਰ ਨੂੰ ਉਹ ਵਿਕਲਪ ਚੁਣਨ ਦੀ ਆਗਿਆ ਦਿੰਦੇ ਹਨ ਜੋ ਉਸਦੀਆਂ ਪਦਾਰਥਕ ਸਮਰੱਥਾਵਾਂ ਨੂੰ ਪੂਰਾ ਕਰਦਾ ਹੈ, ਬਲਕਿ ਵਾਹਨ ਚਲਾਉਣ ਨਾਲ ਵੱਧ ਤੋਂ ਵੱਧ ਆਰਾਮ ਪ੍ਰਾਪਤ ਕਰਨਾ ਵੀ ਸੰਭਵ ਬਣਾਉਂਦਾ ਹੈ.
ਪ੍ਰਸਾਰਣ ਦੀਆਂ ਮੁੱਖ ਕਿਸਮਾਂ ਬਾਰੇ ਸੰਖੇਪ ਵਿੱਚ ਦੱਸਿਆ ਗਿਆ ਹੈ ਵੱਖਰੀ ਸਮੀਖਿਆ... ਹੁਣ ਆਓ ਆਪਾਂ ਇਸ ਬਾਰੇ ਵਧੇਰੇ ਵਿਸਥਾਰ ਨਾਲ ਗੱਲ ਕਰੀਏ ਕਿ ਰੋਬੋਟਿਕ ਗੀਅਰਬਾਕਸ ਕੀ ਹੈ, ਇਸ ਦੇ ਮੈਨੂਅਲ ਗੀਅਰਬਾਕਸ ਨਾਲੋਂ ਮੁੱਖ ਅੰਤਰ ਹਨ, ਅਤੇ ਇਸ ਯੂਨਿਟ ਦੇ ਸੰਚਾਲਨ ਦੇ ਸਿਧਾਂਤ ਤੇ ਵੀ ਵਿਚਾਰ ਕਰੀਏ.
ਰੋਬੋਟਿਕ ਗਿਅਰਬਾਕਸ ਕੀ ਹੈ
ਗੇਅਰ ਬਾਕਸ ਦਾ ਕੰਮ ਕੁਝ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਦੇ ਅਪਵਾਦ ਦੇ ਨਾਲ ਮਕੈਨੀਕਲ ਐਨਾਲਾਗ ਦੇ ਲਗਭਗ ਸਮਾਨ ਹੈ. ਰੋਬੋਟ ਦੇ ਉਪਕਰਣ ਵਿੱਚ ਬਹੁਤ ਸਾਰੇ ਹਿੱਸੇ ਸ਼ਾਮਲ ਹਨ ਜੋ ਬਾਕਸ ਦਾ ਮਕੈਨੀਕਲ ਰੂਪ ਬਣਾਉਂਦੇ ਹਨ ਜੋ ਪਹਿਲਾਂ ਹੀ ਹਰੇਕ ਨੂੰ ਜਾਣਦਾ ਹੈ. ਰੋਬੋਟਿਕ ਵਿਚਲਾ ਮੁੱਖ ਅੰਤਰ ਇਹ ਹੈ ਕਿ ਇਸ ਦਾ ਨਿਯੰਤਰਣ ਇਕ ਮਾਈਕਰੋਪ੍ਰੋਸੈਸਰ ਕਿਸਮ ਦਾ ਹੁੰਦਾ ਹੈ. ਅਜਿਹੇ ਗੀਅਰਬਾਕਸਾਂ ਵਿੱਚ, ਗੇਅਰ ਸ਼ਿਫਿੰਗ ਇੰਜਨ ਦੇ ਸੈਂਸਰਾਂ, ਗੈਸ ਪੈਡਲ ਅਤੇ ਪਹੀਏ ਦੇ ਅੰਕੜਿਆਂ ਦੇ ਅਧਾਰ ਤੇ ਇਲੈਕਟ੍ਰੋਨਿਕਸ ਦੁਆਰਾ ਕੀਤੀ ਜਾਂਦੀ ਹੈ.

ਰੋਬੋਟਿਕ ਬਾਕਸ ਨੂੰ ਆਟੋਮੈਟਿਕ ਮਸ਼ੀਨ ਵੀ ਕਿਹਾ ਜਾ ਸਕਦਾ ਹੈ, ਪਰ ਇਹ ਇਕ ਗਲਤ ਨਾਮ ਹੈ. ਤੱਥ ਇਹ ਹੈ ਕਿ ਆਟੋਮੈਟਿਕ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਅਕਸਰ ਆਮਕਰਨ ਦੇ ਸੰਕਲਪ ਵਜੋਂ ਵਰਤੀ ਜਾਂਦੀ ਹੈ. ਸੋ, ਉਸੇ ਵੇਰੀਏਟਰ ਕੋਲ ਗੀਅਰ ਅਨੁਪਾਤ ਨੂੰ ਬਦਲਣ ਲਈ ਇੱਕ ਆਟੋਮੈਟਿਕ ਮੋਡ ਹੈ, ਇਸ ਲਈ ਕੁਝ ਲੋਕਾਂ ਲਈ ਇਹ ਇਕ ਆਟੋਮੈਟਿਕ ਵੀ ਹੈ. ਦਰਅਸਲ, ਰੋਬੋਟ ਬਣਤਰ ਅਤੇ ਕਾਰਜ ਦੇ ਸਿਧਾਂਤ ਵਿਚ ਇਕ ਮਕੈਨੀਕਲ ਬਾਕਸ ਦੇ ਨੇੜੇ ਹੈ.
ਬਾਹਰੋਂ, ਆਟੋਮੈਟਿਕ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਅਤੇ ਮੈਨੂਅਲ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਵਿਚ ਫਰਕ ਕਰਨਾ ਅਸੰਭਵ ਹੈ, ਕਿਉਂਕਿ ਉਨ੍ਹਾਂ ਵਿਚ ਇਕੋ ਜਿਹਾ ਚੋਣਕਾਰ ਅਤੇ ਸਰੀਰ ਹੋ ਸਕਦਾ ਹੈ. ਤੁਸੀਂ ਉਦੋਂ ਹੀ ਪ੍ਰਸਾਰਣ ਦੀ ਜਾਂਚ ਕਰ ਸਕਦੇ ਹੋ ਜਦੋਂ ਵਾਹਨ ਚਲਾ ਰਿਹਾ ਹੋਵੇ. ਹਰ ਕਿਸਮ ਦੀ ਇਕਾਈ ਦੀ ਕਾਰਜ ਦੀਆਂ ਆਪਣੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਹਨ.
ਰੋਬੋਟਿਕ ਸੰਚਾਰ ਦਾ ਮੁੱਖ ਉਦੇਸ਼ ਡ੍ਰਾਇਵਿੰਗ ਨੂੰ ਵੱਧ ਤੋਂ ਵੱਧ ਆਸਾਨ ਬਣਾਉਣਾ ਹੈ. ਡਰਾਈਵਰ ਨੂੰ ਆਪਣੇ ਆਪ ਗੇਅਰ ਸਵਿਚ ਕਰਨ ਦੀ ਜ਼ਰੂਰਤ ਨਹੀਂ ਹੁੰਦੀ - ਇਹ ਕੰਮ ਕੰਟਰੋਲ ਯੂਨਿਟ ਦੁਆਰਾ ਕੀਤਾ ਜਾਂਦਾ ਹੈ. ਆਰਾਮ ਤੋਂ ਇਲਾਵਾ, ਆਟੋਮੈਟਿਕ ਟਰਾਂਸਮਿਸ਼ਨ ਨਿਰਮਾਤਾ ਆਪਣੇ ਉਤਪਾਦਾਂ ਨੂੰ ਸਸਤਾ ਬਣਾਉਣ ਲਈ ਯਤਨਸ਼ੀਲ ਹਨ. ਅੱਜ, ਰੋਬੋਟ ਮਕੈਨਿਕਸ ਦੇ ਬਾਅਦ ਸਭ ਤੋਂ ਬਜਟ ਦੀ ਕਿਸਮ ਦਾ ਗੇਅਰਬਾਕਸ ਹੈ, ਪਰ ਇਹ ਵੇਰੀਏਟਰ ਜਾਂ ਆਟੋਮੈਟਿਕ ਦੇ ਤੌਰ ਤੇ ਅਜਿਹੇ ਡਰਾਈਵਿੰਗ ਆਰਾਮ ਪ੍ਰਦਾਨ ਨਹੀਂ ਕਰਦਾ.
ਰੋਬੋਟਿਕ ਗੀਅਰਬਾਕਸ ਦਾ ਸਿਧਾਂਤ
ਰੋਬੋਟਿਕ ਸੰਚਾਰ ਅਗਲੀ ਗਤੀ ਤੇ ਸਵੈਚਲ ਰੂਪ ਵਿੱਚ ਜਾਂ ਅਰਧ-ਆਟੋਮੈਟਿਕਲੀ ਬਦਲ ਸਕਦਾ ਹੈ. ਪਹਿਲੇ ਕੇਸ ਵਿੱਚ, ਮਾਈਕ੍ਰੋਪ੍ਰੋਸੈਸਰ ਯੂਨਿਟ ਸੰਵੇਦਕਾਂ ਤੋਂ ਸੰਕੇਤ ਪ੍ਰਾਪਤ ਕਰਦਾ ਹੈ, ਜਿਸ ਦੇ ਅਧਾਰ ਤੇ ਨਿਰਮਾਤਾ ਦੁਆਰਾ ਪ੍ਰੋਗਰਾਮ ਕੀਤਾ ਐਲਗੋਰਿਦਮ ਚਾਲੂ ਹੁੰਦਾ ਹੈ.
ਬਹੁਤੇ ਗੀਅਰਬਾਕਸ ਇਕ ਮੈਨੂਅਲ ਚੋਣਕਾਰ ਨਾਲ ਲੈਸ ਹਨ. ਇਸ ਸਥਿਤੀ ਵਿੱਚ, ਗਤੀ ਅਜੇ ਵੀ ਆਪਣੇ ਆਪ ਚਾਲੂ ਹੋ ਜਾਵੇਗੀ. ਸਿਰਫ ਇਕੋ ਚੀਜ਼ ਇਹ ਹੈ ਕਿ ਡਰਾਈਵਰ ਸੁਤੰਤਰ ਰੂਪ ਤੋਂ ਇਕ ਅਪ ਜਾਂ ਡਾਉਨ ਗੇਅਰ 'ਤੇ ਸਵਿਚ ਕਰਨ ਦੇ ਸੰਕੇਤ ਦੇ ਸਕਦਾ ਹੈ. ਟਿਪਟ੍ਰੋਨਿਕ ਕਿਸਮ ਦੇ ਕੁਝ ਆਟੋਮੈਟਿਕ ਸੰਚਾਰਾਂ ਦਾ ਇਕੋ ਜਿਹਾ ਸਿਧਾਂਤ ਹੁੰਦਾ ਹੈ.
ਗਤੀ ਵਧਾਉਣ ਜਾਂ ਘਟਾਉਣ ਲਈ, ਡਰਾਈਵਰ ਚੋਣਕਾਰ ਲੀਵਰ ਨੂੰ + ਜਾਂ ਵੱਲ - ਵੱਲ ਭੇਜਦਾ ਹੈ. ਇਸ ਵਿਕਲਪ ਦਾ ਧੰਨਵਾਦ, ਕੁਝ ਲੋਕ ਇਸ ਪ੍ਰਸਾਰਣ ਨੂੰ ਕ੍ਰਮਵਾਦੀ ਜਾਂ ਕ੍ਰਮਵਾਦੀ ਕਹਿੰਦੇ ਹਨ.
ਰੋਬੋਟਿਕ ਬਾਕਸ ਹੇਠ ਲਿਖੀਆਂ ਯੋਜਨਾਵਾਂ ਅਨੁਸਾਰ ਕੰਮ ਕਰਦਾ ਹੈ:
- ਡਰਾਈਵਰ ਬ੍ਰੇਕ ਲਾਗੂ ਕਰਦਾ ਹੈ, ਇੰਜਣ ਚਾਲੂ ਕਰਦਾ ਹੈ ਅਤੇ ਡ੍ਰਾਇਵਿੰਗ ਮੋਡ ਚੋਣਕਾਰ ਲੀਵਰ ਨੂੰ ਡੀ ਦੀ ਸਥਿਤੀ ਤੇ ਲੈ ਜਾਂਦਾ ਹੈ;
- ਯੂਨਿਟ ਦਾ ਸੰਕੇਤ ਬਾਕਸ ਕੰਟਰੋਲ ਯੂਨਿਟ ਨੂੰ ਜਾਂਦਾ ਹੈ;
- ਚੁਣੇ ਹੋਏ modeੰਗ 'ਤੇ ਨਿਰਭਰ ਕਰਦਿਆਂ, ਨਿਯੰਤਰਣ ਇਕਾਈ ਉਚਿਤ ਐਲਗੋਰਿਦਮ ਨੂੰ ਸਰਗਰਮ ਕਰਦੀ ਹੈ ਜਿਸ ਦੇ ਅਨੁਸਾਰ ਯੂਨਿਟ ਕੰਮ ਕਰੇਗੀ;
- ਅੰਦੋਲਨ ਦੀ ਪ੍ਰਕਿਰਿਆ ਵਿਚ, ਸੰਵੇਦਕ ਵਾਹਨ ਦੀ ਗਤੀ, ਪਾਵਰ ਯੂਨਿਟ ਦੇ ਭਾਰ ਅਤੇ ਮੌਜੂਦਾ ਗੀਅਰਬਾਕਸ ਮੋਡ ਬਾਰੇ "ਰੋਬੋਟ ਦੇ ਦਿਮਾਗ" ਨੂੰ ਸੰਕੇਤ ਭੇਜਦੇ ਹਨ;
- ਜਿਵੇਂ ਹੀ ਸੰਕੇਤਕ ਫੈਕਟਰੀ ਤੋਂ ਸਥਾਪਿਤ ਪ੍ਰੋਗ੍ਰਾਮ ਦੇ ਅਨੁਸਾਰੀ ਹੋਣਾ ਬੰਦ ਕਰ ਦਿੰਦੇ ਹਨ, ਨਿਯੰਤਰਣ ਇਕਾਈ ਨੇ ਇਕ ਹੋਰ ਗੇਅਰ ਨੂੰ ਬਦਲਣ ਦੀ ਕਮਾਨ ਦੇ ਦਿੱਤੀ. ਇਹ ਜਾਂ ਤਾਂ ਵਾਧਾ ਹੋ ਸਕਦਾ ਹੈ ਜਾਂ ਗਤੀ ਵਿੱਚ ਕਮੀ.
ਜਦੋਂ ਕੋਈ ਡਰਾਈਵਰ ਮਕੈਨਿਕਾਂ ਨਾਲ ਕਾਰ ਚਲਾ ਰਿਹਾ ਹੈ, ਉਸ ਪਲ ਨੂੰ ਨਿਰਧਾਰਤ ਕਰਨ ਲਈ ਉਸ ਨੂੰ ਆਪਣੀ ਵਾਹਨ ਮਹਿਸੂਸ ਕਰਨੀ ਚਾਹੀਦੀ ਹੈ ਜਦੋਂ ਵੱਖਰੀ ਗਤੀ ਤੇ ਜਾਣਾ ਹੈ. ਰੋਬੋਟਿਕ ਐਨਾਲਾਗ ਵਿੱਚ, ਇੱਕ ਸਮਾਨ ਪ੍ਰਕਿਰਿਆ ਹੁੰਦੀ ਹੈ, ਸਿਰਫ ਡਰਾਈਵਰ ਨੂੰ ਇਸ ਬਾਰੇ ਸੋਚਣ ਦੀ ਜ਼ਰੂਰਤ ਨਹੀਂ ਹੁੰਦੀ ਕਿ ਸ਼ਿਫਟ ਲੀਵਰ ਨੂੰ ਲੋੜੀਂਦੀ ਸਥਿਤੀ ਵਿੱਚ ਕਦੋਂ ਲਿਜਾਣਾ ਹੈ. ਇਸ ਦੀ ਬਜਾਏ, ਮਾਈਕ੍ਰੋਪ੍ਰੋਸੈਸਰ ਇਹ ਕਰਦਾ ਹੈ.
ਸਿਸਟਮ ਸਾਰੇ ਸੈਂਸਰਾਂ ਤੋਂ ਸਾਰੀ ਜਾਣਕਾਰੀ ਦੀ ਨਿਗਰਾਨੀ ਕਰਦਾ ਹੈ ਅਤੇ ਖਾਸ ਲੋਡ ਲਈ ਅਨੁਕੂਲ ਗੀਅਰ ਦੀ ਚੋਣ ਕਰਦਾ ਹੈ. ਤਾਂ ਜੋ ਇਲੈਕਟ੍ਰਾਨਿਕਸ ਗੇਅਰਜ਼ ਨੂੰ ਬਦਲ ਸਕਣ, ਟਰਾਂਸਮਿਸ਼ਨ ਵਿੱਚ ਹਾਈਡਰੋਮੈਕਨਿਕਲ ਐਕਟਿatorਟਰ ਹੈ. ਵਧੇਰੇ ਆਮ ਸੰਸਕਰਣ ਵਿਚ, ਹਾਈਡਰੋਮੈਕਨਿਕਸ ਦੀ ਬਜਾਏ, ਇਕ ਇਲੈਕਟ੍ਰਿਕ ਡ੍ਰਾਇਵ ਜਾਂ ਇਕ ਸਰਵੋ ਡ੍ਰਾਇਵ ਸਥਾਪਿਤ ਕੀਤੀ ਗਈ ਹੈ, ਜੋ ਬਕਸੇ ਵਿਚ ਕਲੱਸ ਨੂੰ ਜੋੜਦੀ / ਡਿਸਕਨੈਕਟ ਕਰ ਦਿੰਦੀ ਹੈ (ਤਰੀਕੇ ਨਾਲ, ਇਸ ਵਿਚ ਆਟੋਮੈਟਿਕ ਗੀਅਰਬਾਕਸ ਨਾਲ ਕੁਝ ਸਮਾਨਤਾਵਾਂ ਹਨ - ਕਲੱਚ ਸਥਿਤ ਨਹੀਂ ਹੈ ਜਿਥੇ ਇਹ ਮੈਨੂਅਲ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਵਿਚ ਹੈ, ਅਰਥਾਤ ਫਲਾਈਵੀਲ ਦੇ ਨੇੜੇ, ਪਰ ਹਾ theਸਿੰਗ ਵਿਚ ਹੀ ਸੰਚਾਰ).
ਜਦੋਂ ਨਿਯੰਤਰਣ ਇਕਾਈ ਇਹ ਸੰਕੇਤ ਦਿੰਦੀ ਹੈ ਕਿ ਇਹ ਇਕ ਵੱਖਰੀ ਗਤੀ ਤੇ ਜਾਣ ਦਾ ਸਮਾਂ ਹੈ, ਪਹਿਲਾਂ ਇਲੈਕਟ੍ਰਿਕ (ਜਾਂ ਹਾਈਡਰੋਮੈਨੀਕਲ) ਸਰਵੋ ਡਰਾਈਵ ਨੂੰ ਪਹਿਲਾਂ ਸਰਗਰਮ ਕੀਤਾ ਜਾਂਦਾ ਹੈ. ਇਹ ਕਲਚ ਦੇ ਰਗੜੇ ਦੀਆਂ ਸਤਹਾਂ ਨੂੰ ਭੰਗ ਕਰ ਦਿੰਦਾ ਹੈ. ਦੂਜਾ ਸਰਵੋ ਫਿਰ ਵਿਧੀ ਵਿਚ ਗੀਅਰਾਂ ਨੂੰ ਲੋੜੀਂਦੀ ਸਥਿਤੀ ਵੱਲ ਭੇਜਦਾ ਹੈ. ਫਿਰ ਪਹਿਲਾ ਇੱਕ ਹੌਲੀ ਹੌਲੀ ਪਕੜ ਛੱਡਦਾ ਹੈ. ਇਹ ਡਿਜ਼ਾਇਨ ਡਰਾਈਵਰ ਦੀ ਭਾਗੀਦਾਰੀ ਤੋਂ ਬਗੈਰ ਕੰਮ ਕਰਨ ਦੀ ਇਜਾਜ਼ਤ ਦਿੰਦਾ ਹੈ, ਇਸ ਲਈ, ਰੋਬੋਟਿਕ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਵਾਲੀ ਮਸ਼ੀਨ ਦਾ ਕਲਚ ਪੈਡਲ ਨਹੀਂ ਹੁੰਦਾ.

ਚੋਣਕਾਰ 'ਤੇ ਕਈ ਗੀਅਰਬਾਕਸਾਂ ਨੇ ਗੀਅਰ ਪੋਜੀਸ਼ਨਾਂ ਲਈ ਮਜਬੂਰ ਕੀਤਾ ਹੈ. ਇਹ ਅਖੌਤੀ ਟਿਪਟ੍ਰੋਨਿਕ ਡਰਾਈਵਰ ਨੂੰ ਉੱਚ ਜਾਂ ਘੱਟ ਗਤੀ ਤੇ ਜਾਣ ਦੇ ਪਲ ਨੂੰ ਸੁਤੰਤਰ ਤੌਰ ਤੇ ਨਿਯੰਤਰਣ ਕਰਨ ਦੀ ਆਗਿਆ ਦਿੰਦਾ ਹੈ.
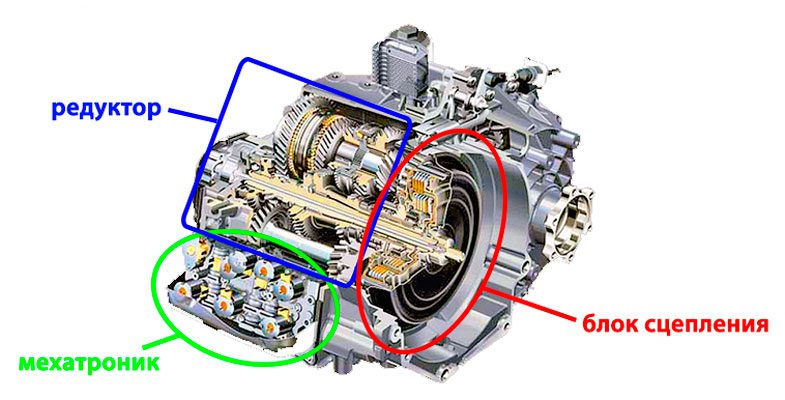
ਰੋਬੋਟਿਕ ਗੀਅਰਬਾਕਸ ਉਪਕਰਣ
ਅੱਜ, ਯਾਤਰੀ ਕਾਰਾਂ ਲਈ ਕਈ ਤਰਾਂ ਦੀਆਂ ਰੋਬੋਟਿਕ ਪ੍ਰਸਾਰਣ ਹਨ. ਕੁਝ ਅਭਿਆਸਕਾਂ ਵਿਚ ਉਹ ਇਕ ਦੂਜੇ ਤੋਂ ਵੱਖਰੇ ਹੋ ਸਕਦੇ ਹਨ, ਪਰ ਮੁੱਖ ਹਿੱਸੇ ਇਕੋ ਜਿਹੇ ਰਹਿੰਦੇ ਹਨ.
ਗਿਅਰਬਾਕਸ ਵਿੱਚ ਸ਼ਾਮਲ ਨੋਡ ਇੱਥੇ ਹਨ:
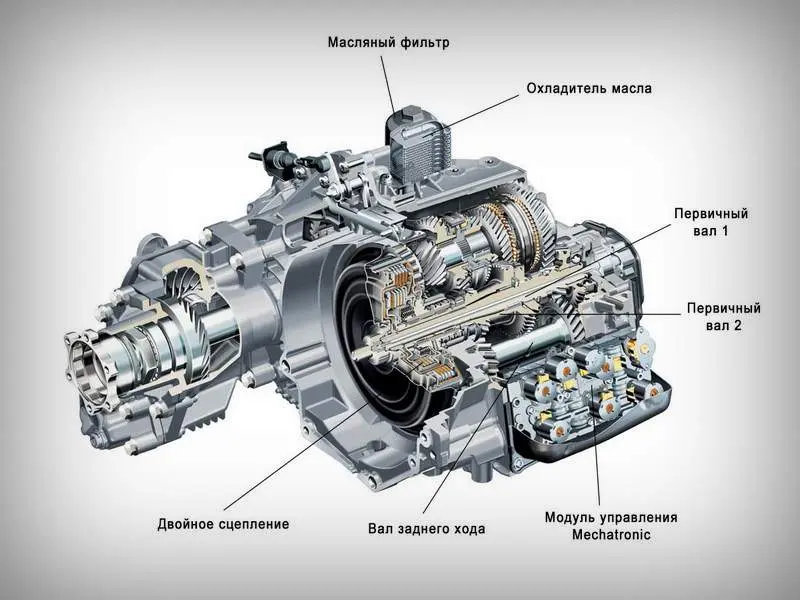
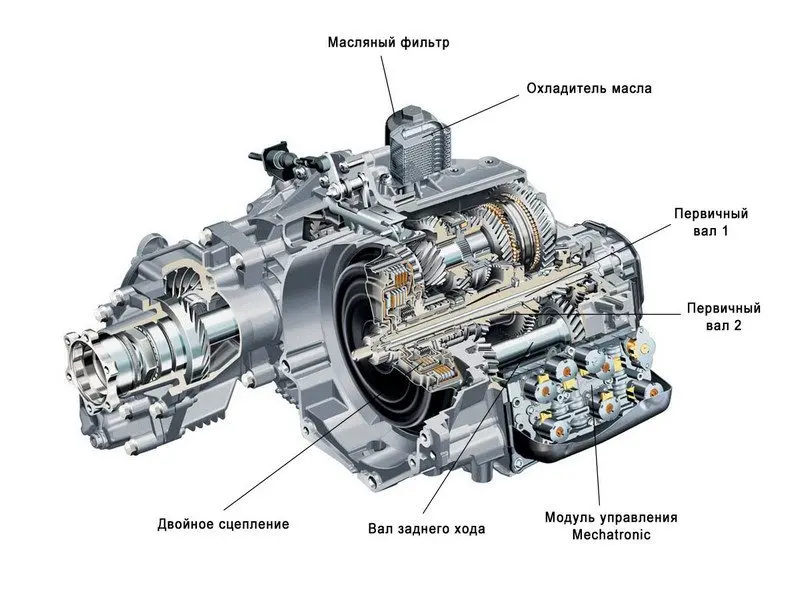
- ਕਲਚ. ਨਿਰਮਾਤਾ ਅਤੇ ਇਕਾਈ ਦੀ ਸੋਧ 'ਤੇ ਨਿਰਭਰ ਕਰਦਿਆਂ, ਇਹ ਇੱਕ ਰਗੜ ਦੀ ਸਤਹ ਜਾਂ ਕਈ ਸਮਾਨ ਡਿਸਕਾਂ ਨਾਲ ਇੱਕ ਹਿੱਸਾ ਹੋ ਸਕਦਾ ਹੈ. ਅਕਸਰ, ਇਹ ਤੱਤ ਕੂਲੈਂਟ ਵਿਚ ਹੁੰਦੇ ਹਨ, ਜੋ ਯੂਨਿਟ ਦੇ ਕੰਮ ਨੂੰ ਸਥਿਰ ਕਰਦੇ ਹਨ, ਇਸ ਨੂੰ ਜ਼ਿਆਦਾ ਗਰਮੀ ਤੋਂ ਰੋਕਦੇ ਹਨ. ਚੋਣ ਜਾਂ ਦੋਹਰਾ ਵਿਕਲਪ ਵਧੇਰੇ ਪ੍ਰਭਾਵਸ਼ਾਲੀ ਮੰਨਿਆ ਜਾਂਦਾ ਹੈ. ਇਸ ਸੋਧ ਵਿਚ, ਜਦੋਂ ਇਕ ਗੇਅਰ ਲਗਿਆ ਹੋਇਆ ਹੈ, ਦੂਜਾ ਸਮੂਹ ਅਗਲੀ ਗਤੀ ਨੂੰ ਚਾਲੂ ਕਰਨ ਦੀ ਤਿਆਰੀ ਕਰ ਰਿਹਾ ਹੈ.
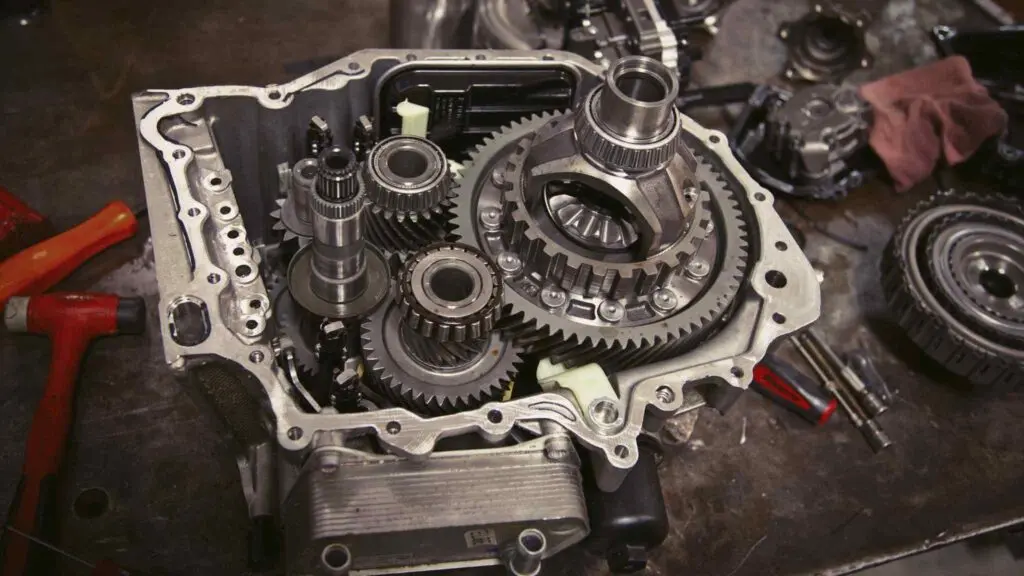
- ਮੁੱਖ ਹਿੱਸਾ ਇੱਕ ਰਵਾਇਤੀ ਮਕੈਨੀਕਲ ਬਾਕਸ ਹੈ. ਹਰੇਕ ਨਿਰਮਾਤਾ ਵੱਖਰੇ ਮਲਕੀਅਤ ਡਿਜ਼ਾਈਨ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ. ਉਦਾਹਰਣ ਦੇ ਲਈ, ਮਰਸਡੀਜ਼ ਬ੍ਰਾਂਡ (ਸਪੀਡਸ਼ਿਫਟ) ਦਾ ਇੱਕ ਰੋਬੋਟ ਅੰਦਰੂਨੀ ਤੌਰ ਤੇ ਇੱਕ 7 ਜੀ-ਟ੍ਰੌਨਿਕ ਆਟੋਮੈਟਿਕ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਹੈ. ਇਕਾਈਆਂ ਵਿਚ ਇਕੋ ਇਕ ਅੰਤਰ ਇਹ ਹੈ ਕਿ ਟਾਰਕ ਕਨਵਰਟਰ ਦੀ ਬਜਾਏ, ਕਈ ਫ੍ਰੈਕਸ਼ਨ ਡਿਸਕਾਂ ਵਾਲਾ ਕਲਚ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ. ਬੀਐਮਡਬਲਯੂ ਦੀ ਵੀ ਅਜਿਹੀ ਹੀ ਪਹੁੰਚ ਹੈ. ਇਸ ਦਾ ਐਸਐਮਜੀ ਗਿਅਰਬਾਕਸ ਛੇ-ਸਪੀਡ ਮੈਨੁਅਲ ਗਿਅਰਬਾਕਸ 'ਤੇ ਅਧਾਰਤ ਹੈ.
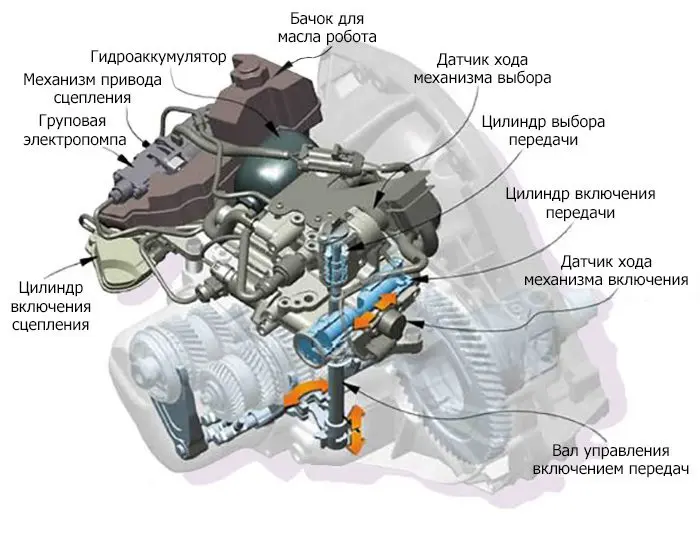
- ਕਲਚ ਅਤੇ ਸੰਚਾਰ ਡਰਾਈਵ. ਇੱਥੇ ਦੋ ਵਿਕਲਪ ਹਨ - ਇਲੈਕਟ੍ਰਿਕ ਡ੍ਰਾਇਵ ਜਾਂ ਹਾਈਡਰੋਮੈਕਨਿਕਲ ਐਨਾਲਾਗ ਦੇ ਨਾਲ. ਪਹਿਲੇ ਕੇਸ ਵਿੱਚ, ਕਲਚ ਨੂੰ ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰ ਦੁਆਰਾ ਬਾਹਰ ਕੱ .ਿਆ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਦੂਜੇ ਵਿੱਚ - ਈਐਮ ਵਾਲਵ ਦੇ ਨਾਲ ਹਾਈਡ੍ਰੌਲਿਕ ਸਿਲੰਡਰਾਂ ਦੁਆਰਾ. ਇਲੈਕਟ੍ਰਿਕ ਡ੍ਰਾਇਵ ਹਾਈਡ੍ਰੌਲਿਕਸ ਦੇ ਮੁਕਾਬਲੇ ਹੌਲੀ ਕੰਮ ਕਰਦੀ ਹੈ, ਪਰ ਇਸ ਨੂੰ ਲਾਈਨ ਵਿਚ ਨਿਰੰਤਰ ਦਬਾਅ ਬਣਾਈ ਰੱਖਣ ਦੀ ਜ਼ਰੂਰਤ ਨਹੀਂ ਹੁੰਦੀ, ਜਿੱਥੋਂ ਇਲੈਕਟ੍ਰੋ-ਹਾਈਡ੍ਰੌਲਿਕ ਕਿਸਮ ਕੰਮ ਕਰਦੀ ਹੈ. ਹਾਈਡ੍ਰੌਲਿਕ ਰੋਬੋਟ ਅਗਲੇ ਪੜਾਅ ਤੇ ਤੇਜ਼ੀ ਨਾਲ ਚਲਦਾ ਹੈ (ਇਲੈਕਟ੍ਰਿਕ ਐਨਾਲਾਗ ਲਈ 0,05 ਸਕਿੰਟ ਬਨਾਮ 0,5 ਸਕਿੰਟ). ਇੱਕ ਇਲੈਕਟ੍ਰਿਕ ਗਿਅਰਬਾਕਸ ਮੁੱਖ ਤੌਰ ਤੇ ਬਜਟ ਕਾਰਾਂ ਤੇ ਸਥਾਪਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਪ੍ਰੀਮੀਅਮ ਸਪੋਰਟਸ ਕਾਰਾਂ ਤੇ ਇੱਕ ਹਾਈਡਰੋਮੈਨੀਕਲ ਗਿਅਰਬਾਕਸ ਲਗਾਇਆ ਜਾਂਦਾ ਹੈ, ਕਿਉਂਕਿ ਡ੍ਰਾਈਵ ਸ਼ਾਫਟ ਨੂੰ ਬਿਜਲੀ ਸਪਲਾਈ ਵਿੱਚ ਰੁਕਾਵਟ ਦਿੱਤੇ ਬਿਨਾਂ ਗੀਅਰਸ਼ਿਫਟ ਦੀ ਗਤੀ ਉਹਨਾਂ ਵਿੱਚ ਬਹੁਤ ਮਹੱਤਵਪੂਰਨ ਹੈ.

- ਸੈਂਸਰ. ਰੋਬੋਟ ਵਿਚ ਬਹੁਤ ਸਾਰੇ ਅਜਿਹੇ ਹਿੱਸੇ ਹਨ. ਉਹ ਪ੍ਰਸਾਰਣ ਦੇ ਬਹੁਤ ਸਾਰੇ ਵੱਖੋ ਵੱਖਰੇ ਮਾਪਦੰਡਾਂ ਦੀ ਨਿਗਰਾਨੀ ਕਰਦੇ ਹਨ, ਉਦਾਹਰਣ ਵਜੋਂ, ਫੋਰਕਸ ਦੀ ਸਥਿਤੀ, ਇਨਪੁਟ ਅਤੇ ਆਉਟਪੁੱਟ ਸ਼ੈਫਟ ਦੇ ਘੁੰਮਣ, ਜਿਸ ਸਥਿਤੀ ਵਿੱਚ ਚੋਣਕਾਰ ਸਵਿਚ ਨੂੰ ਤਾਲਾਬੰਦ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਕੂਲੰਟ ਦਾ ਤਾਪਮਾਨ, ਆਦਿ. ਇਹ ਸਾਰੀ ਜਾਣਕਾਰੀ ਵਿਧੀ ਨਿਯੰਤਰਣ ਉਪਕਰਣ ਨੂੰ ਦਿੱਤੀ ਜਾਂਦੀ ਹੈ.
- ਈਸੀਯੂ ਇਕ ਮਾਈਕ੍ਰੋਪ੍ਰੋਸੈਸਰ ਇਕਾਈ ਹੈ, ਜਿਸ ਵਿਚ ਸੈਂਸਰਾਂ ਤੋਂ ਆਉਣ ਵਾਲੇ ਵੱਖਰੇ ਸੂਚਕਾਂ ਨਾਲ ਵੱਖਰੇ ਐਲਗੋਰਿਦਮ ਪ੍ਰੋਗਰਾਮ ਕੀਤੇ ਗਏ ਹਨ. ਇਹ ਇਕਾਈ ਮੁੱਖ ਨਿਯੰਤਰਣ ਇਕਾਈ ਨਾਲ ਜੁੜੀ ਹੋਈ ਹੈ (ਉੱਥੋਂ ਇੰਜਨ ਦੇ ਸੰਚਾਲਨ ਦੇ ਅੰਕੜੇ ਆਉਂਦੇ ਹਨ), ਅਤੇ ਇਲੈਕਟ੍ਰਾਨਿਕ ਪਹੀਏ ਲਾਕਿੰਗ ਪ੍ਰਣਾਲੀਆਂ (ਏਬੀਐਸ ਜਾਂ ਈਐਸਪੀ) ਨਾਲ ਜੁੜਿਆ ਹੋਇਆ ਹੈ.
- ਐਕਟਿatorsਟਰਜ਼ - ਹਾਈਡ੍ਰੌਲਿਕ ਸਿਲੰਡਰ ਜਾਂ ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰਾਂ, ਬਾਕਸ ਦੀ ਸੋਧ ਦੇ ਅਧਾਰ ਤੇ.
ਆਰ ਕੇ ਪੀ ਪੀ ਦੇ ਕੰਮ ਦੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ
ਵਾਹਨ ਨੂੰ ਸੁਚਾਰੂ startੰਗ ਨਾਲ ਚਲਾਉਣ ਲਈ, ਡਰਾਈਵਰ ਨੂੰ ਲਾਜ਼ਮੀ ਤੌਰ 'ਤੇ ਕਲਚ ਪੈਡਲ ਦੀ ਵਰਤੋਂ ਕਰਨੀ ਚਾਹੀਦੀ ਹੈ. ਉਸ ਨੇ ਪਹਿਲਾਂ ਜਾਂ ਉਲਟਾ ਗੇਅਰ ਸ਼ਾਮਲ ਕਰਨ ਤੋਂ ਬਾਅਦ, ਉਸ ਨੂੰ ਪੇਡਲ ਨੂੰ ਸੁਚਾਰੂ releaseੰਗ ਨਾਲ ਜਾਰੀ ਕਰਨ ਦੀ ਜ਼ਰੂਰਤ ਹੈ. ਇਕ ਵਾਰ ਜਦੋਂ ਡਰਾਈਵਰ ਨੂੰ ਡਿਸਕਸ ਦੀ ਸ਼ਮੂਲੀਅਤ ਦੀ ਭਾਵਨਾ ਮਹਿਸੂਸ ਹੁੰਦੀ ਹੈ, ਜਿਵੇਂ ਕਿ ਉਹ ਪੇਡਲ ਜਾਰੀ ਕਰਦਾ ਹੈ, ਤਾਂ ਉਹ ਕਾਰ ਨੂੰ ਰੁਕਣ ਤੋਂ ਰੋਕਣ ਲਈ ਆਰਪੀਐਮ ਨੂੰ ਇੰਜਣ ਵਿਚ ਸ਼ਾਮਲ ਕਰ ਸਕਦਾ ਹੈ. ਇਸ ਤਰ੍ਹਾਂ ਮਕੈਨਿਕ ਕੰਮ ਕਰਦੇ ਹਨ.
ਇਕੋ ਜਿਹੀ ਪ੍ਰਕਿਰਿਆ ਰੋਬੋਟਿਕ ਹਮਰੁਤਬਾ ਵਿਚ ਹੁੰਦੀ ਹੈ. ਸਿਰਫ ਇਸ ਸਥਿਤੀ ਵਿੱਚ ਡਰਾਈਵਰ ਤੋਂ ਇੱਕ ਮਹਾਨ ਹੁਨਰ ਦੀ ਲੋੜ ਨਹੀਂ ਹੁੰਦੀ. ਉਸ ਨੂੰ ਸਿਰਫ ਬਾਕਸ ਸਵਿੱਚ ਨੂੰ positionੁਕਵੀਂ ਸਥਿਤੀ ਤੇ ਲੈ ਜਾਣ ਦੀ ਜ਼ਰੂਰਤ ਹੈ. ਵਾਹਨ ਕੰਟਰੋਲ ਯੂਨਿਟ ਦੀ ਸੈਟਿੰਗ ਦੇ ਅਨੁਸਾਰ ਚਲਣਾ ਸ਼ੁਰੂ ਕਰ ਦੇਵੇਗਾ.

ਸਰਬੋਤਮ ਸਿੰਗਲ-ਕਲਚ ਸੰਸ਼ੋਧਨ ਕਲਾਸਿਕ ਮਕੈਨਿਕਾਂ ਦੀ ਤਰ੍ਹਾਂ ਕੰਮ ਕਰਦਾ ਹੈ. ਹਾਲਾਂਕਿ, ਉਸੇ ਸਮੇਂ, ਇੱਕ ਸਮੱਸਿਆ ਹੈ - ਇਲੈਕਟ੍ਰਾਨਿਕਸ ਕਲਾਚ ਫੀਡਬੈਕ ਨੂੰ ਰਿਕਾਰਡ ਨਹੀਂ ਕਰਦੇ. ਜੇ ਕੋਈ ਵਿਅਕਤੀ ਇਹ ਨਿਰਧਾਰਤ ਕਰਨ ਦੇ ਯੋਗ ਹੁੰਦਾ ਹੈ ਕਿ ਕਿਸੇ ਖਾਸ ਕੇਸ ਵਿੱਚ ਪੈਡਲ ਨੂੰ ਜਾਰੀ ਕਰਨਾ ਕਿੰਨੀ ਸੁਚਾਰੂ necessaryੰਗ ਨਾਲ ਜ਼ਰੂਰੀ ਹੈ, ਤਾਂ ਸਵੈਚਾਲਨ ਵਧੇਰੇ ਸਖਤ worksੰਗ ਨਾਲ ਕੰਮ ਕਰਦਾ ਹੈ, ਇਸ ਲਈ ਕਾਰ ਦੀ ਆਵਾਜਾਈ ਮੂਰਖਤਾ ਵਾਲੀਆਂ ਜ਼ਖਮਾਂ ਦੇ ਨਾਲ ਹੈ.
ਇਹ ਖਾਸ ਤੌਰ ਤੇ ਐਕਟਿatorsਟਰਾਂ ਦੀ ਇਲੈਕਟ੍ਰਿਕ ਡ੍ਰਾਈਵ ਦੇ ਨਾਲ ਸੋਧਿਆਂ ਵਿੱਚ ਮਹਿਸੂਸ ਕੀਤਾ ਜਾਂਦਾ ਹੈ - ਜਦੋਂ ਕਿ ਗੇਅਰ ਬਦਲ ਰਿਹਾ ਹੈ, ਕਲਚ ਇੱਕ ਖੁੱਲੀ ਅਵਸਥਾ ਵਿੱਚ ਹੋਵੇਗਾ. ਇਸ ਦਾ ਅਰਥ ਟਾਰਕ ਦੇ ਪ੍ਰਵਾਹ ਵਿਚ ਰੁਕਾਵਟ ਹੋਵੇਗੀ, ਜਿਸ ਕਾਰਨ ਕਾਰ ਹੌਲੀ ਹੌਲੀ ਆਉਣੀ ਸ਼ੁਰੂ ਹੋ ਜਾਵੇਗੀ. ਕਿਉਂਕਿ ਪਹੀਏ ਦੇ ਘੁੰਮਣ ਦੀ ਗਤੀ ਪਹਿਲਾਂ ਹੀ ਰੁਝੇਵੇਂ ਵਾਲੇ ਗੀਅਰ ਦੇ ਨਾਲ ਘੱਟ ਅਨੁਕੂਲ ਹੈ, ਇੱਕ ਹਲਕਾ ਜਿਹਾ ਝਟਕਾ ਆਉਂਦਾ ਹੈ.
ਇਸ ਸਮੱਸਿਆ ਦਾ ਇਕ ਨਵੀਨਤਾਕਾਰੀ ਹੱਲ ਇਕ ਡਬਲ-ਕਲਚ ਸੋਧ ਦਾ ਵਿਕਾਸ ਸੀ. ਇਸ ਤਰ੍ਹਾਂ ਦੇ ਸੰਚਾਰਨ ਦਾ ਇੱਕ ਪ੍ਰਭਾਵਸ਼ਾਲੀ ਨੁਮਾਇੰਦਾ ਵੋਲਕਸਵੈਗਨ ਡੀਐਸਜੀ ਹੈ. ਆਓ ਇਸ ਦੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ 'ਤੇ ਇਕ ਡੂੰਘੀ ਵਿਚਾਰ ਕਰੀਏ.
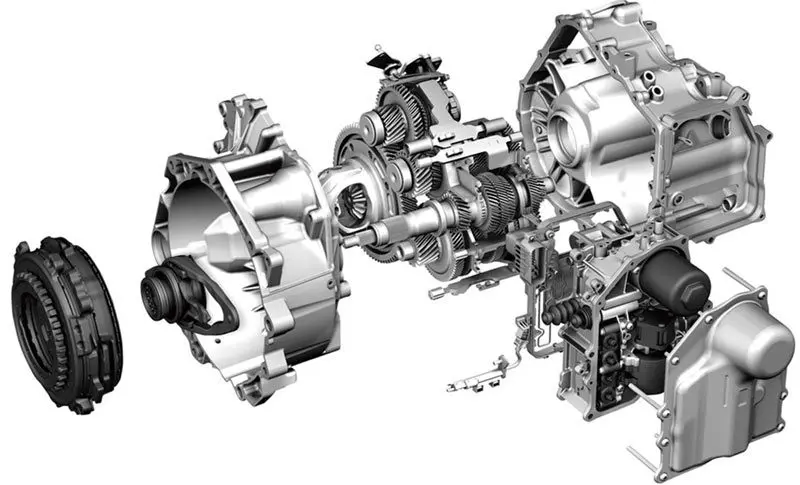
ਡੀਐਸਜੀ ਰੋਬੋਟਿਕ ਗੀਅਰਬਾਕਸ ਦੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ
ਸੰਖੇਪ ਦਾ ਅਰਥ ਸਿੱਧਾ ਸਿਫਟ ਗਿਅਰਬਾਕਸ ਹੈ. ਦਰਅਸਲ, ਇਹ ਇਕ ਮਕੈਨੀਕਲ ਬਕਸੇ ਹਨ ਜੋ ਇਕ ਹਾ housingਸਿੰਗ ਵਿਚ ਸਥਾਪਿਤ ਕੀਤੇ ਗਏ ਹਨ, ਪਰ ਇਕ ਕੁਨੈਕਸ਼ਨ ਪੁਆਇੰਟ ਨਾਲ ਮਸ਼ੀਨ ਦੇ ਚੈਸੀ ਵਿਚ. ਹਰੇਕ ਵਿਧੀ ਦੀ ਆਪਣੀ ਪਕੜ ਹੁੰਦੀ ਹੈ.
ਇਸ ਸੋਧ ਦੀ ਮੁੱਖ ਵਿਸ਼ੇਸ਼ਤਾ ਪ੍ਰੀਜੈਕਟਿਵ ਮੋਡ ਹੈ. ਇਹ ਹੈ, ਜਦੋਂ ਕਿ ਪਹਿਲਾ ਸ਼ੈਫਟ ਲੱਗੇ ਗੀਅਰ ਦੇ ਨਾਲ ਚੱਲ ਰਿਹਾ ਹੈ, ਇਲੈਕਟ੍ਰੋਨਿਕਸ ਪਹਿਲਾਂ ਹੀ ਸੰਬੰਧਿਤ ਗਿਅਰਸ ਨੂੰ ਜੋੜਦਾ ਹੈ (ਜਦੋਂ ਗੀਅਰ ਨੂੰ ਵਧਾਉਣ ਲਈ ਤੇਜ਼ ਹੁੰਦਾ ਹੈ, ਜਦੋਂ ਨਿਘਾਰ ਹੋ ਰਿਹਾ ਹੈ - ਜਦੋਂ ਘੱਟ ਹੁੰਦਾ ਹੈ). ਮੁੱਖ ਐਕਟਿatorਟਰ ਨੂੰ ਸਿਰਫ ਇੱਕ ਕਲਚ ਨੂੰ ਡਿਸਕਨੈਕਟ ਕਰਨ ਅਤੇ ਦੂਜੇ ਨਾਲ ਜੁੜਨ ਦੀ ਜ਼ਰੂਰਤ ਹੈ. ਜਿਵੇਂ ਹੀ ਕਿਸੇ ਹੋਰ ਪੜਾਅ 'ਤੇ ਜਾਣ ਲਈ ਨਿਯੰਤਰਣ ਇਕਾਈ ਤੋਂ ਸੰਕੇਤ ਮਿਲਦਾ ਹੈ, ਕੰਮ ਕਰਨ ਵਾਲਾ ਕਲਚ ਖੋਲ੍ਹਿਆ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਦੂਜਾ ਪਹੀਆਂ ਜੋ ਪਹਿਲਾਂ ਹੀ ਖਰਾਬ ਹੋ ਜਾਂਦਾ ਹੈ ਤੁਰੰਤ ਜੁੜ ਜਾਂਦਾ ਹੈ.
ਇਹ ਡਿਜ਼ਾਇਨ ਤੁਹਾਨੂੰ ਤੇਜ਼ ਕਰਨ ਵੇਲੇ ਤੁਹਾਨੂੰ ਮਜ਼ਬੂਤ ਝਟਕੇ ਬਿਨਾਂ ਸਵਾਰੀ ਕਰਨ ਦੀ ਆਗਿਆ ਦਿੰਦਾ ਹੈ. ਚੋਣਵੀਂ ਸੋਧ ਦਾ ਪਹਿਲਾ ਵਿਕਾਸ ਪਿਛਲੀ ਸਦੀ ਦੇ 80 ਵਿਆਂ ਵਿਚ ਪ੍ਰਗਟ ਹੋਇਆ ਸੀ. ਇਹ ਸੱਚ ਹੈ ਕਿ ਫਿਰ ਰੈਲੀ ਅਤੇ ਰੇਸਿੰਗ ਕਾਰਾਂ 'ਤੇ ਡਬਲ ਕਲਚ ਵਾਲੇ ਰੋਬੋਟ ਲਗਾਏ ਗਏ ਸਨ ਜਿਸ ਵਿਚ ਗੀਅਰ ਸ਼ਿਫਟ ਦੀ ਗਤੀ ਅਤੇ ਸ਼ੁੱਧਤਾ ਬਹੁਤ ਮਹੱਤਵ ਰੱਖਦੀ ਹੈ.
ਜੇ ਅਸੀਂ ਡੀਐਸਜੀ ਬਾਕਸ ਦੀ ਤੁਲਨਾ ਇਕ ਕਲਾਸਿਕ ਆਟੋਮੈਟਿਕ ਨਾਲ ਕਰਦੇ ਹਾਂ, ਤਾਂ ਪਹਿਲੇ ਵਿਕਲਪ ਦੇ ਵਧੇਰੇ ਫਾਇਦੇ ਹਨ. ਪਹਿਲਾਂ, ਮੁੱਖ ਤੱਤਾਂ ਦੇ ਵਧੇਰੇ ਜਾਣੂ structureਾਂਚੇ ਦੇ ਕਾਰਨ (ਨਿਰਮਾਤਾ ਕਿਸੇ ਵੀ ਰੈਡੀਮੇਡ ਮਕੈਨੀਕਲ ਐਨਾਲਾਗ ਨੂੰ ਅਧਾਰ ਦੇ ਤੌਰ ਤੇ ਲੈ ਸਕਦਾ ਹੈ), ਅਜਿਹਾ ਬਾਕਸ ਵਿਕਰੀ 'ਤੇ ਸਸਤਾ ਹੋਵੇਗਾ. ਇਹੀ ਕਾਰਕ ਯੂਨਿਟ ਦੀ ਦੇਖਭਾਲ ਨੂੰ ਪ੍ਰਭਾਵਤ ਕਰਦਾ ਹੈ - ਮਕੈਨਿਕ ਵਧੇਰੇ ਭਰੋਸੇਮੰਦ ਅਤੇ ਮੁਰੰਮਤ ਕਰਨਾ ਅਸਾਨ ਹਨ.
ਇਹ ਨਿਰਮਾਤਾ ਨੂੰ ਉਨ੍ਹਾਂ ਦੇ ਉਤਪਾਦਾਂ ਦੇ ਬਜਟ ਮਾਡਲਾਂ 'ਤੇ ਇਕ ਨਵੀਨਤਾ ਪ੍ਰਸਾਰਣ ਸਥਾਪਤ ਕਰਨ ਦੇ ਯੋਗ ਬਣਾਉਂਦਾ ਹੈ. ਦੂਜਾ, ਅਜਿਹੇ ਗਿਅਰਬਾਕਸ ਵਾਲੇ ਵਾਹਨਾਂ ਦੇ ਬਹੁਤ ਸਾਰੇ ਮਾਲਕ ਇਕੋ ਜਿਹੇ ਮਾਡਲ ਦੀ ਤੁਲਨਾ ਵਿਚ ਕਾਰ ਦੀ ਆਰਥਿਕਤਾ ਵਿਚ ਵਾਧਾ ਨੋਟ ਕਰਦੇ ਹਨ, ਪਰ ਇਕ ਵੱਖਰੇ ਗੀਅਰਬਾਕਸ ਨਾਲ.
ਵੀਏਜੀ ਚਿੰਤਾ ਦੇ ਇੰਜੀਨੀਅਰਾਂ ਨੇ ਡੀਐਸਜੀ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਦੇ ਦੋ ਰੂਪ ਵਿਕਸਿਤ ਕੀਤੇ ਹਨ. ਉਨ੍ਹਾਂ ਵਿਚੋਂ ਇਕ 'ਤੇ 6 ਲੇਬਲ ਲਗਾਇਆ ਗਿਆ ਹੈ, ਅਤੇ ਦੂਜਾ 7 ਹੈ, ਜੋ ਕਿ ਬਾਕਸ ਵਿਚਲੇ ਕਦਮਾਂ ਦੀ ਸੰਖਿਆ ਨਾਲ ਮੇਲ ਖਾਂਦਾ ਹੈ. ਇਸ ਤੋਂ ਇਲਾਵਾ, ਛੇ ਸਪੀਡ ਆਟੋਮੈਟਿਕ ਇੱਕ ਗਿੱਲੇ ਕਲਚ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ, ਅਤੇ ਸੱਤ ਸਪੀਡ ਐਨਾਲਾਗ ਇੱਕ ਸੁੱਕਾ ਕਲਚ ਵਰਤਦਾ ਹੈ. ਡੀਐਸਜੀ ਬਾਕਸ ਦੇ ਗੁਣਾਂ ਅਤੇ ਵਿੱਤ ਬਾਰੇ ਵਧੇਰੇ ਵਿਸਥਾਰ ਵਿੱਚ, ਨਾਲ ਹੀ ਇਹ ਕਿ ਡੀਐਸਜੀ 6 ਮਾਡਲ ਸੱਤਵੀਂ ਸੋਧ ਤੋਂ ਕਿਵੇਂ ਵੱਖਰਾ ਹੈ, ਵਿੱਚ ਦੱਸਿਆ ਗਿਆ ਹੈ ਵੱਖਰਾ ਲੇਖ.
ਫਾਇਦੇ ਅਤੇ ਨੁਕਸਾਨ
ਪ੍ਰਸਾਰਣ ਦੀ ਵਿਚਾਰੀ ਕਿਸਮ ਦੇ ਸਕਾਰਾਤਮਕ ਅਤੇ ਨਕਾਰਾਤਮਕ ਦੋਵੇਂ ਪਾਸੇ ਹਨ. ਬਾਕਸ ਦੇ ਫਾਇਦਿਆਂ ਵਿੱਚ ਸ਼ਾਮਲ ਹਨ:
- ਅਜਿਹੀ ਪ੍ਰਸਾਰਣ ਦੀ ਵਰਤੋਂ ਲਗਭਗ ਕਿਸੇ ਵੀ ਪਾਵਰ ਦੀ ਪਾਵਰ ਯੂਨਿਟ ਨਾਲ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ;
- ਇੱਕ ਪਰਿਵਰਤਕ ਅਤੇ ਇੱਕ ਆਟੋਮੈਟਿਕ ਮਸ਼ੀਨ ਦੀ ਤੁਲਨਾ ਵਿੱਚ, ਰੋਬੋਟਿਕ ਸੰਸਕਰਣ ਸਸਤਾ ਹੁੰਦਾ ਹੈ, ਹਾਲਾਂਕਿ ਇਹ ਇੱਕ ਨਵੀਨਤਮ ਵਿਕਾਸ ਹੈ;
- ਰੋਬੋਟ ਹੋਰ ਆਟੋਮੈਟਿਕ ਪ੍ਰਸਾਰਣਾਂ ਨਾਲੋਂ ਵਧੇਰੇ ਭਰੋਸੇਮੰਦ ਹੁੰਦੇ ਹਨ;
- ਮਕੈਨਿਕਸ ਦੇ ਨਾਲ ਅੰਦਰੂਨੀ ਸਮਾਨਤਾ ਦੇ ਕਾਰਨ, ਇੱਕ ਮਾਹਰ ਨੂੰ ਲੱਭਣਾ ਸੌਖਾ ਹੈ ਜੋ ਯੂਨਿਟ ਦੀ ਮੁਰੰਮਤ ਕਰੇਗਾ;
- ਵਧੇਰੇ ਕੁਸ਼ਲ ਗਿਅਰ ਸ਼ਿਫਟਿੰਗ ਬਾਲਣ ਦੀ ਖਪਤ ਵਿੱਚ ਮਹੱਤਵਪੂਰਣ ਵਾਧੇ ਦੇ ਬਗੈਰ ਇੰਜਣ ਦੀ ਸ਼ਕਤੀ ਦੀ ਵਰਤੋਂ ਦੀ ਆਗਿਆ ਦਿੰਦੀ ਹੈ;
- ਕੁਸ਼ਲਤਾ ਵਿੱਚ ਸੁਧਾਰ ਕਰਕੇ, ਮਸ਼ੀਨ ਵਾਤਾਵਰਣ ਵਿੱਚ ਘੱਟ ਨੁਕਸਾਨਦੇਹ ਪਦਾਰਥ ਬਾਹਰ ਕੱ .ਦੀ ਹੈ.
ਹੋਰ ਆਟੋਮੈਟਿਕ ਸੰਚਾਰਾਂ ਦੇ ਸਪੱਸ਼ਟ ਫਾਇਦਿਆਂ ਦੇ ਬਾਵਜੂਦ, ਰੋਬੋਟ ਦੇ ਕਈ ਮਹੱਤਵਪੂਰਨ ਨੁਕਸਾਨ ਹਨ:
- ਜੇ ਕਾਰ ਇਕ ਸਿੰਗਲ-ਡਿਸਕ ਰੋਬੋਟ ਨਾਲ ਲੈਸ ਹੈ, ਤਾਂ ਅਜਿਹੇ ਵਾਹਨ ਦੀ ਯਾਤਰਾ ਨੂੰ ਅਰਾਮਦਾਇਕ ਨਹੀਂ ਕਿਹਾ ਜਾ ਸਕਦਾ. ਜਦੋਂ ਗੇਅਰਜ਼ ਨੂੰ ਬਦਲ ਰਹੇ ਹੋਵੋਗੇ, ਤਾਂ ਠੋਸ ਮੱਕੜ ਹੋ ਜਾਣਗੇ, ਜਿਵੇਂ ਕਿ ਡਰਾਈਵਰ ਅਚਾਨਕ ਮਕੈਨਿਕਸ ਤੇ ਕਲੱਚ ਪੈਡਲ ਸੁੱਟ ਦਿੰਦਾ ਹੈ.
- ਬਹੁਤੇ ਅਕਸਰ, ਕਲਚ (ਘੱਟ ਨਿਰਵਿਘਨ ਰੁਝੇਵਿਆਂ) ਅਤੇ ਕਾਰਜਕਰਤਾ ਇਕਾਈ ਵਿੱਚ ਅਸਫਲ ਰਹਿੰਦੇ ਹਨ. ਇਹ ਪ੍ਰਸਾਰਣ ਦੀ ਮੁਰੰਮਤ ਨੂੰ ਗੁੰਝਲਦਾਰ ਬਣਾਉਂਦਾ ਹੈ, ਕਿਉਂਕਿ ਉਨ੍ਹਾਂ ਕੋਲ ਕੰਮ ਕਰਨ ਦਾ ਇੱਕ ਛੋਟਾ ਜਿਹਾ ਸਰੋਤ ਹੈ (ਲਗਭਗ 100 ਹਜ਼ਾਰ ਕਿਲੋਮੀਟਰ). ਘੱਟ ਹੀ ਸਰਵੋਜ਼ ਦੀ ਮੁਰੰਮਤ ਹੋ ਜਾਂਦੀ ਹੈ ਅਤੇ ਇੱਕ ਨਵਾਂ ਵਿਧੀ ਮਹਿੰਗੀ ਪੈਂਦੀ ਹੈ.
- ਜਿਵੇਂ ਕਿ ਕਲਚ, ਡਿਸਕ ਸਰੋਤ ਵੀ ਬਹੁਤ ਘੱਟ ਹੈ - ਲਗਭਗ 60 ਹਜ਼ਾਰ. ਇਸ ਤੋਂ ਇਲਾਵਾ, ਤਕਰੀਬਨ ਅੱਧੇ ਸਰੋਤਾਂ ਦੇ ਹਿੱਸਿਆਂ ਦੇ ਰਗੜੇ ਦੀ ਸਤਹ ਦੀ ਸ਼ਰਤ ਅਧੀਨ ਬਾਕਸ ਦੇ "ਕੁਨੈਕਸ਼ਨ" ਨੂੰ ਪੂਰਾ ਕਰਨਾ ਜ਼ਰੂਰੀ ਹੈ.
- ਜੇ ਅਸੀਂ ਡੀਐਸਜੀ ਦੀ ਤਰਜੀਹੀ ਤਬਦੀਲੀ ਦੀ ਗੱਲ ਕਰਦੇ ਹਾਂ, ਤਾਂ ਸਪੀਡਿੰਗ ਸਪੀਡ ਕਰਨ ਲਈ ਘੱਟ ਸਮਾਂ ਹੋਣ ਕਰਕੇ ਇਹ ਵਧੇਰੇ ਭਰੋਸੇਮੰਦ ਸਾਬਤ ਹੋਇਆ (ਇਸਦਾ ਧੰਨਵਾਦ, ਕਾਰ ਇੰਨੀ ਹੌਲੀ ਨਹੀਂ ਹੁੰਦੀ). ਇਸ ਦੇ ਬਾਵਜੂਦ, ਉਨ੍ਹਾਂ ਵਿਚ ਅੜਿੱਕਾ ਅਜੇ ਵੀ ਸਹਿ ਰਿਹਾ ਹੈ.
ਸੂਚੀਬੱਧ ਕਾਰਕਾਂ ਨੂੰ ਧਿਆਨ ਵਿੱਚ ਰੱਖਦਿਆਂ, ਅਸੀਂ ਇਹ ਸਿੱਟਾ ਕੱ can ਸਕਦੇ ਹਾਂ ਕਿ ਜਿੱਥੋਂ ਤੱਕ ਭਰੋਸੇਯੋਗਤਾ ਅਤੇ ਕਾਰਜਸ਼ੀਲ ਜ਼ਿੰਦਗੀ ਦਾ ਸੰਬੰਧ ਹੈ, ਮਕੈਨਿਕਸ ਦੀ ਅਜੇ ਕੋਈ ਬਰਾਬਰ ਨਹੀਂ ਹੈ. ਜੇ ਵੱਧ ਤੋਂ ਵੱਧ ਆਰਾਮ 'ਤੇ ਜ਼ੋਰ ਦਿੱਤਾ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਫਿਰ ਪਰਿਵਰਤਕ (ਇਸ ਦੀ ਵਿਸ਼ੇਸ਼ਤਾ ਕੀ ਹੈ, ਦੀ ਚੋਣ ਕਰੋ) ਦੀ ਚੋਣ ਕਰਨਾ ਬਿਹਤਰ ਹੈ ਇੱਥੇ). ਇਹ ਯਾਦ ਰੱਖਣਾ ਚਾਹੀਦਾ ਹੈ ਕਿ ਅਜਿਹੀ ਪ੍ਰਸਾਰਣ ਬਾਲਣ ਨੂੰ ਬਚਾਉਣ ਦਾ ਮੌਕਾ ਪ੍ਰਦਾਨ ਨਹੀਂ ਕਰੇਗੀ.
ਸਿੱਟੇ ਵਜੋਂ, ਅਸੀਂ ਪ੍ਰਸਾਰਣ ਦੀਆਂ ਮੁੱਖ ਕਿਸਮਾਂ - ਉਨ੍ਹਾਂ ਦੇ ਫ਼ਾਇਦੇ ਅਤੇ ਵਿਗਾੜ ਦੀ ਇੱਕ ਛੋਟੀ ਜਿਹੀ ਵੀਡੀਓ ਤੁਲਨਾ ਪੇਸ਼ ਕਰਦੇ ਹਾਂ:

ਪ੍ਰਸ਼ਨ ਅਤੇ ਉੱਤਰ:
ਇੱਕ ਆਟੋਮੇਟਨ ਅਤੇ ਰੋਬੋਟ ਵਿੱਚ ਕੀ ਅੰਤਰ ਹੈ? ਆਟੋਮੈਟਿਕ ਟਰਾਂਸਮਿਸ਼ਨ ਟਾਰਕ ਕਨਵਰਟਰ ਦੇ ਖਰਚੇ 'ਤੇ ਕੰਮ ਕਰਦਾ ਹੈ (ਕਲਚ ਦੁਆਰਾ ਫਲਾਈਵ੍ਹੀਲ ਨਾਲ ਕੋਈ ਸਖ਼ਤ ਜੋੜੀ ਨਹੀਂ ਹੈ), ਅਤੇ ਰੋਬੋਟ ਮਕੈਨਿਕਸ ਦੇ ਸਮਾਨ ਹੈ, ਸਿਰਫ ਸਪੀਡਾਂ ਨੂੰ ਆਪਣੇ ਆਪ ਬਦਲਿਆ ਜਾਂਦਾ ਹੈ।
ਰੋਬੋਟ ਬਾਕਸ 'ਤੇ ਗੇਅਰਸ ਨੂੰ ਕਿਵੇਂ ਬਦਲਣਾ ਹੈ? ਰੋਬੋਟ ਚਲਾਉਣ ਦਾ ਸਿਧਾਂਤ ਇੱਕ ਆਟੋਮੈਟਿਕ ਡ੍ਰਾਈਵਿੰਗ ਦੇ ਸਮਾਨ ਹੈ: ਚੋਣਕਾਰ 'ਤੇ ਲੋੜੀਂਦਾ ਮੋਡ ਚੁਣਿਆ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਇੰਜਣ ਦੀ ਗਤੀ ਗੈਸ ਪੈਡਲ ਦੁਆਰਾ ਨਿਯੰਤ੍ਰਿਤ ਕੀਤੀ ਜਾਂਦੀ ਹੈ. ਸਪੀਡ ਆਪਣੇ ਆਪ ਬਦਲ ਜਾਵੇਗੀ।
ਰੋਬੋਟ ਵਾਲੀ ਕਾਰ ਵਿੱਚ ਕਿੰਨੇ ਪੈਡਲ ਹਨ? ਹਾਲਾਂਕਿ ਰੋਬੋਟ ਢਾਂਚਾਗਤ ਤੌਰ 'ਤੇ ਮਕੈਨਿਕ ਵਰਗਾ ਹੈ, ਕਲੱਚ ਆਪਣੇ ਆਪ ਹੀ ਫਲਾਈਵ੍ਹੀਲ ਤੋਂ ਵੱਖ ਹੋ ਜਾਂਦਾ ਹੈ, ਇਸਲਈ ਰੋਬੋਟਿਕ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਵਾਲੀ ਕਾਰ ਦੇ ਦੋ ਪੈਡਲ (ਗੈਸ ਅਤੇ ਬ੍ਰੇਕ) ਹੁੰਦੇ ਹਨ।
ਰੋਬੋਟ ਬਾਕਸ ਨਾਲ ਕਾਰ ਨੂੰ ਸਹੀ ਢੰਗ ਨਾਲ ਕਿਵੇਂ ਪਾਰਕ ਕਰਨਾ ਹੈ? ਯੂਰਪੀਅਨ ਮਾਡਲ ਨੂੰ A ਮੋਡ ਜਾਂ ਰਿਵਰਸ ਗੀਅਰ ਵਿੱਚ ਪਾਰਕ ਕੀਤਾ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ। ਜੇਕਰ ਕਾਰ ਅਮਰੀਕਨ ਹੈ, ਤਾਂ ਚੋਣਕਾਰ 'ਤੇ ਪੀ ਮੋਡ ਹੈ।
ਇੱਕ ਟਿੱਪਣੀ
ਡੇਵਿਡ
ਹੈਲੋ, ਮੈਨੂੰ ਮਦਦ ਦੀ ਲੋੜ ਹੈ, 203 ਕੂਪ ਐਮਰਜੈਂਸੀ ਮੋਡ ਵਿੱਚ ਚਲੇ ਗਏ, ਮੈਂ ਕੀ ਕਰ ਸਕਦਾ ਹਾਂ?